Assessment of the Effectiveness of the System for Monitoring Movement Kinematics in Patients of Neurosurgical Profile with Functional Disorders of the Locomotor Apparatus
The aim of the study was to assess the system designed for determining the efficiency of rehabilitation measures in patients of neurosurgical profile with functional disorders of the locomotor apparatus.
Materials and Methods. In 2017–2018, a series of investigations were carried out at the Polenov Neurosurgical Institute involving 35 patients aged 30–70 years with various pathologies of CNS and locomotor system (paraplegia, hemiparesis, tetraparesis) and 15 healthy volunteers aged 20–45 years.
Measurements were performed before rehabilitation (days 2–3 after the operation) and on rehabilitation days 3–4 (days 5–6 after the operation) using the developed system of movement kinematics monitoring built on 13 bit analog-to-digital converter with 46 kHz maximal sampling rate and 0.1% error. The system has two micromechanical sensors each containing three-axis accelerometer with a 6 g measurement range. The sensors connected to the analog-to-digital converter by a cable are fixed to the footwear on the external side of each heel.
The data obtained with this measuring system were processed using the “Program for identifying step phases”.
Results. Phases of the step have been identified, phase duration calculated, mathematical expectation and root-mean-square deviation of phase durations assessed. Kinematic profiles of the patients have been presented.
Conclusions to positive or negative dynamics of rehabilitation after the application of exercise complexes have been drawn based on the kinematic profiles obtained.
Phase durations for healthy individuals have been established to be within 20 ms and a uniform distribution of root-mean-square deviation dispersions relative to the step phases has been traced. Deviations of patients’ phase durations and dispersions relative to healthy persons have been shown.
Conclusion. Theproposed monitoring system provides the control of the process of movement kinematics correction in the course of patient rehabilitation and gives a quantitative assessment of the conducted treatment efficacy.
Introduction
Walking is a complex coordination cyclic motor action requiring aerobic energy supply. The process of walking involves all parts and segments of the musculoskeletal apparatus and systems providing their rational functioning primarily nervous, cardiovascular, and respiratory [1]. Concerted activity of these systems facilitates a well-coordinated work of the extremities, maintaining dynamic balance during movement as well as quick reaction of the body to the environmental changes (surface character, illumination intensity, presence of objects in the area, etc.). When function of one of the systems is impaired, creation of optimal conditions is required to restore the walking technique using individual approaches.
Patients of the neurosurgical profile are the most difficult cohort due to a number of pathophysiological and clinical features.
Nosological classification distinguishes traumatic CNS injuries, tumors, vascular diseases of the nervous system, diseases and damages of the peripheral nerve trunks and spinal column [2]. The pathological processes caused by them in CNS involve focal, organ, and systemic body levels. A clinical picture of focal symptoms is presented by motor and sensory deficit, disorders of higher cortical functions; general cerebral symptoms are associated with changes of intracranial pressure and displacement of craniospinal structures. Impairment of the system-forming and regulatory CNS functions is caused by the systemic level damage affecting the vitally important processes such as respiration, blood circulation, and immune response.
In neurosurgical patients, several sensory systems (analysers) are simultaneously involved in the pathophysiological process resulting in perceptual distortion of the objective reality, alterations on the part of the emotional and volition sphere, different variants of dysphasia. The tasks to be performed by rehabilitologists helping these patients include primarily correction of psychoemotional disorders and overcoming neurosensory deficiency, providing adequate regulation of vital functions (restoration of physiological pattern of respiration and blood circulation).
An indicator of physical rehabilitation efficacy is the degree of returning the patient to his habitual way of life, social and domestic independence, professional activity. Restoration of a walking technique is therefore considered the criterion of rehabilitation procedure quality.
One should pay attention to the fact that the velocity of movement is not an informative parameter unless other features of the walking technique are taken into consideration. One patient can travel in space relatively quickly and without any auxiliary walking aids having a fixed pathological walking pattern, others will go substantially slower but without faults in posture, with a uniform load on the musculoskeletal apparatus which will not entail secondary health abnormalities (arthritis, degenerative and dystrophic diseases of the spine, etc.).
Methods available in practice and recommended for application designed to assess the degree of restoring the walking technique such as Tinetti’s scale, the scale developed by the Research Institute of Neurology (Russian Academy of Medical Sciences), classification scale of movements, and others, cannot be considered sufficient since they rely solely on the method of visual evaluation, reflect mainly the degree of patients independence from the outside help which is only an indirect sign of the quality of movement action restoration and does not involve any informative spatio-temporal characteristics of the technique (pace, rhythm, speed, etc.).
Special exercise complexes are used for patient rehabilitation, however, the proven methods do not always give the expected results in a short period of time (average hospital stay is usually 10 days). In this connection, it is necessary to monitor movement kinematics during the application of exercises and to control the patient’s condition outside the medical setting to continue the effective rehabilitation. It often happens so that people at home stop training or begin to perform incorrectly the complex of exercises recommended to them after the operation or injury which causes harmful effect on their health and newly trained walking skills.
The aim of the study was to assess the system designed for determining the efficiency of rehabilitation measures in patients of neurosurgical profile with functional disorders of the locomotor apparatus.
Materials and Methods
In 2017–2018, a series of investigations were carried out at the Polenov Neurosurgical Institute involving 35 patients aged 30–70 years with various pathologies of the locomotor apparatus associated with CNS injuries (paraplegia, hemiparesis, tetraparesis). Experiments were also conducted on 15 healthy volunteers aged 20–45 years having no abnormalities in the work of the locomotor system and CNS pathologies.
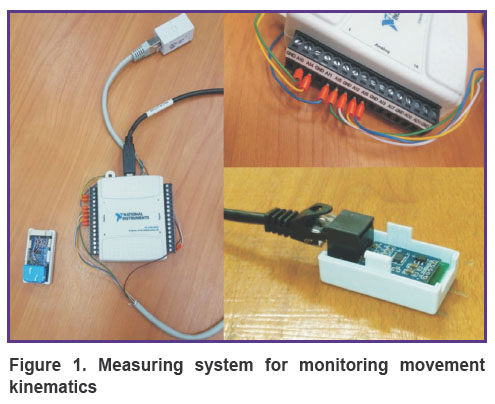
Measurements were performed before rehabilitation (days 2–3 after the operation) and on rehabilitation days 3–4 (days 5–6 after the operation) using the developed system of movement kinematics monitoring (Figure 1) built on 13 bit analog-to-digital converter (ADC) with 46 kHz maximal sampling rate and 0.1% error.
|
Figure 1. Measuring system for monitoring movement kinematics
Monitoring of Movement Kinematics in CNS Pathologies and Disorders of the Locomotor Apparatus |
The system developed by us consisted of two sensors (three-axis accelerometers with a 6 g measurement range), which provide measurements of linear movements in space, and a small-size personal computer. The sensors connected to the ADC by a cable are fixed to the footwear on the external side of each heel. Sensor axes for the right and left foot are oriented in the following way: Y-axis is directed horizontally parallel to the movement direction (sagittal axis of the human body); X-axis is directed vertically; Z-axis runs horizontally parallel to the frontal axis and characterizes lateral deviations of the foot [3]. The suggested pattern of sensor connections does not restrict movements of the examined people. The data are transmitted via a serial interface directly to the PC for analysis and processing. The rehabilitologist conducting the experiment holds the PC in his hands.
Despite the wired interface, the system is not bulky owing to the absence of external stand-alone power sources but we are planning to make it wireless in future.
Data from the measuring system were processed using the computer program for identifying step phases [4] the algorithm of action of which was designed on the basis of works [5, 6, 7].
According to [8], a kinematic profile of a person represents a system of characteristics of informative points of movement on the human body which make it possible to describe its state for different clinical areas and observe the changes in this state.
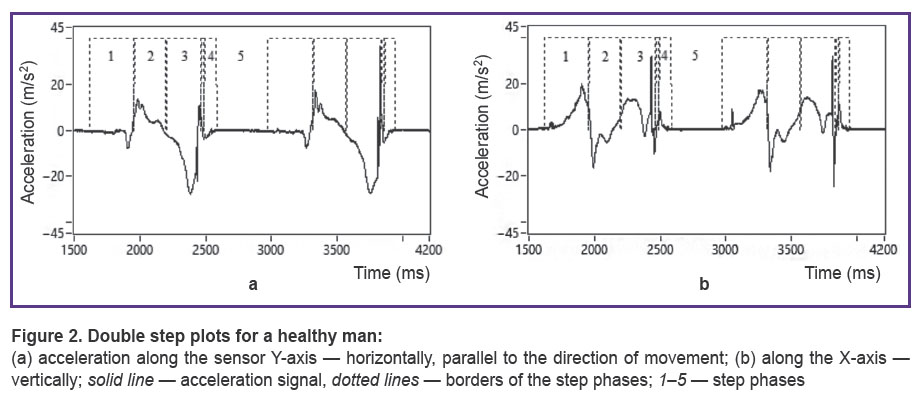
Having examined a group of healthy volunteers, we distinguished five informative points (Figure 2) representing the following step phases: 1 — phase of lifting off the heel; 2 — phase of transfer 1 (time interval from the heel liftoff till the moment when the leg is on the same axis relative to a cross section of the support leg — rear step); 3 — phase transfer 2 (time interval from the moment when the leg is on the same axis relative a cross section of the support leg till the phase of putting the heel down — front step); 4 — putting the leg (heel) down; 5 — a phase of rest (the leg has moved to the state of support).
|
Figure 2. Double step plots for a healthy man: (a) acceleration along the sensor Y-axis — horizontally, parallel to the direction of movement; (b) along the X-axis — vertically; solid line — acceleration signal, dotted lines — borders of the step phases; 1–5 — step phases |
The phase of rest is not pointed out separately in the algorithm, here it is duration between the active phases of the previous and subsequent transfer.
Duration of the step phases was quantitatively assessed using the algorithm of phase identification [3] as well as the algorithm of the assessment of mathematical expectation and root-mean-square deviation (RMSD) of each phase (n=30 — repetition of each phase) which are expressed with the following formula:
Results
The data of linear acceleration have been processed: phases of the step have been identified, phase duration calculated, mathematical expectation and RMSD of phase durations assessed. A kinematic profile for each patient has been composed.
Positive dynamics was noted in 28 patients on days 5–6. In 7 patients, changes were insignificant. The dispersion of RMSD for step phase duration in the majority of patients (n=28) became closer to the uniform character of dispersion after the performance of the exercise complex.
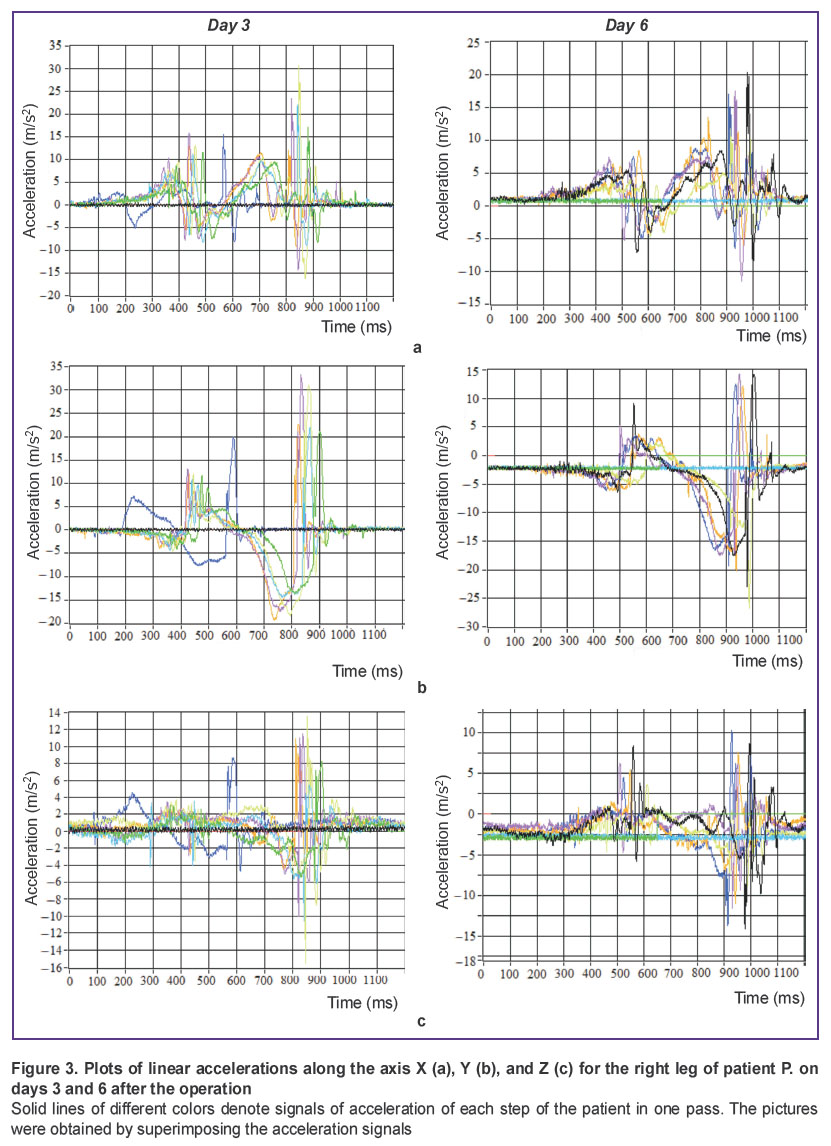
The results of the first and repeated examinations of patient P. who was operated on for removal of a neoplasm at the level of the lumbar part of the spine are presented in Figure 3. After the operation he was established the following diagnosis “paraparesis of the lower limbs with functional disorders of pelvic organs (retention type)”. On discharge, there was noted self-supported movement with a minimum auxiliary technical means; restoration of a motor pattern of walking with adaptation to domestic needs or realization of domestic demands without any assistance (movement, washing).
|
Figure 3. Plots of linear accelerations along the axis X (а), Y (b), and Z (c) for the right leg of patient P. on days 3 and 6 after the operation
Solid lines of different colors denote signals of acceleration of each step of the patient in one pass. The pictures were obtained by superimposing the acceleration signals |
Using the kinematic profiles of patient P. we could draw a conclusion about a positive dynamics of the rehabilitation after the application of the complex of exercises: the kinematics of movements on walking became more precise, the dispersion of step durations and peak values diminished.
Thus, we see that the kinematic profile provides the possibility to control the process of movement kinematics in the course of rehabilitation and to plan further treatment.
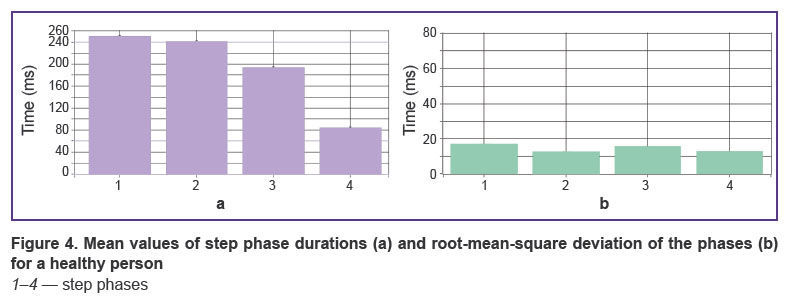
Bar diagrams of dispersion of step phase durations for a healthy person are shown in Figure 4. RMSD for phase durations is within 20 ms and at the same time the distribution of RMSD dispersions is noted to be uniform relative to the step phases (Figure 4 (b)).
|
Figure 4. Mean values of step phase durations (а) and root-mean-square deviation of the phases (b) for a healthy person
1–4 — step phases |
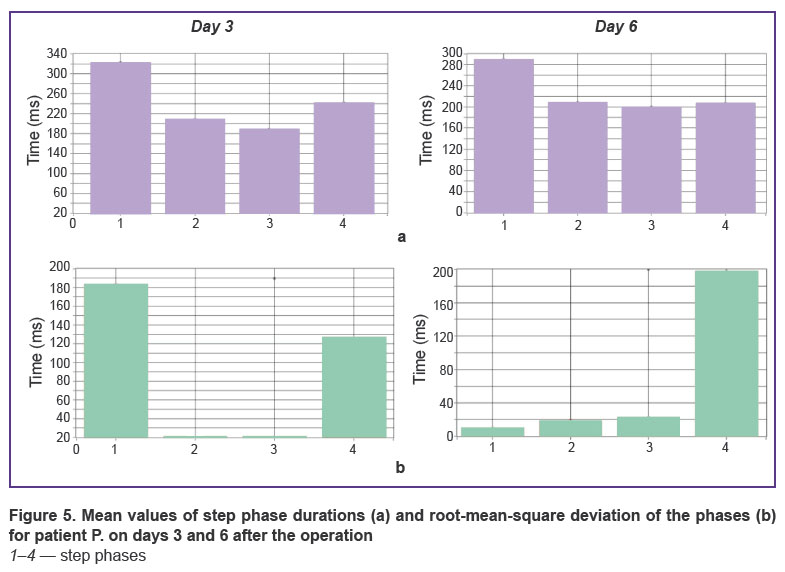
Mean values and RMSD for the step phases of patient P. whose kinematic profiles are shown in Figure 3 are presented in Figure 5. It is seen on the diagrams that after the application of the exercise complex, the phases of transfer and lifting off the heel showed a more uniform character of RMSD distribution (Figures 5 (a) and 4 (a)).
|
Figure 5. Mean values of step phase durations (а) and root-mean-square deviation of the phases (b) for patient P. on days 3 and 6 after the operation
1–4 — step phases |
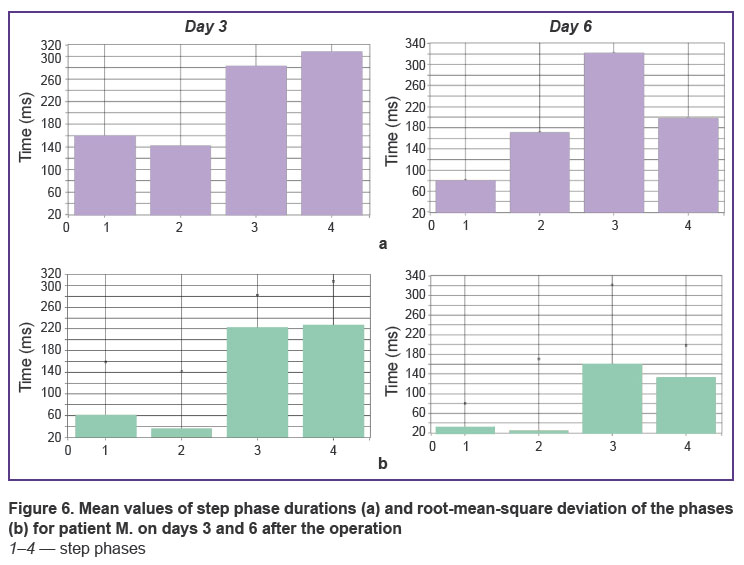
Figure 6 shows mean values and RMSD of the step phases for patient M. who was operated on for neoplasm at the level of thoracic part of the spinal cord. After the operation, he was diagnosed paraplegia, functional disorders of pelvic organs. On discharge, the functions of pelvic organs, motor activity, psychoemotional stabilization in combination with self-service skills were restored.
|
Figure 6. Mean values of step phase durations (а) and root-mean-square deviation of the phases (b) for patient M. on days 3 and 6 after the operation 1–4 — step phases |
Distribution of the mean values of the step phases in the patient before the performance of exercises had a more uniform character though the load during their performance was close to the greatest possible. Step phase RMSD after the exercises became less indicating the improvement of the step disagreement problem.
As a result of the investigations performed it has been established that information on duration of the step phases, peak values in each phase as well as the degrees of nonlinearity of each phase of the step make it possible to control the correction of movement kinematics in the course of patient rehabilitation.
Currently, the work is being carried out on building the path of motion in 3D image format using several parameters in the aggregate: by three axes of linear acceleration and by three axes of angular accelerations. Such visualization will help to observe spatially how the movement of the extremities is realized in the experiment without the presence of an observer.
Conclusion
Presently, there exist no mobile systems like this for determining the efficacy of patients with CNS pathologies and locomotor apparatus disorders. The proposed monitoring system can quantitatively assess the resulting quality of the conducted treatment and allows rehabilitologists to control the process of rehabilitation during hospital stay and at home since the data obtained may be sent to the hospital
physician.
Study funding. The work was not supported by any financial source.
Conflicts of interest. The author has no conflicts of interest to disclose.
References
- Rumyantseva N.A. Kompleksnaya otsenka patologicheskogo patterna khod’by i reabilitatsionnykh programm ee vosstanovleniya u bol’nykh v ostrom periode tserebral’nogo insul’ta. Dis. ... kand. med. nauk [Complex assessment of a pathological walking pattern and rehabilitation programs for its restoration in patients in acute period of cerebral palsy. PhD Dissertation]. Moscow; 2010.
- Belova A.N., Prokopenko A.S. Neyroreabilitatsiya [Neurorehabilitation]. Moscow; 2010.
- Tsareva A.V. Measurement systems algorithms for the phase structure investigation of the person gait. Izvestiya SPbGETU “LETI” 2018; 2: 61–66.
- Programma identifikatsii faz shaga [The computer program for identifying step phases]. Certificate of state registration of computer programs 2018617996. 2018.
- Skvortsov D.V. Klinicheskiy analiz dvizheniy. Analiz pokhodki [Clinical movement analysis. Gait analysis]. Izdatel’stvo NPTs — “Stimul”; 1996; 344 p.
- Kim J.W., Jang H.J., Hwang D.-H., Park C. A step, stride and heading determination for the pedestrian navigation system. Journal of Global Positioning Systems 2004; 3(1&2): 273–279, https://doi.org/10.5081/jgps.3.1.273.
- Kapandzhi A.I. Nizhnyaya konechnost’. Funktsional’naya anatomiya [The lower limb. Functional anatomy]. Eksmo; 2010; 352 p.
- Alekseev V.V., Korolev P.G., Ivanova N.E. Application of micromechanical sensors to control the parameters of human kinematic profile. Pribory 2017; 7: 6–15.