Система функциональной электрической стимуляции мышц для интеграции в экзоскелете
Экзоскелетов с интегрированной системой функциональной электростимуляции (ФЭС), за исключением стационарных систем, в настоящее время на медицинском рынке не представлено.
Цель исследования — разработать систему ФЭС, которая изначально может быть интегрирована в экзоскелет нижних конечностей для обеспечения наилучшей совместимости и синхронизации ее работы с узлами экзоскелета при совершении пациентом движений.
Результаты. Разработана система ФЭС и подход для ее интеграции непосредственно в экзоскелетонное устройство. ФЭС предусматривает одновременную работу от 2 до 4 каналов стимуляции, каждый из которых поддерживает установку параметров сигнала (частоты, амплитуды, длительности). Время включения и выключения стимуляции зависит от фазы шага, определяемой алгоритмом классификации походки. Наличие синхросигналов для левой и правой стороны обеспечивает согласованную работу ФЭС на обеих нижних конечностях пациента. Область применения экзоскелета с интегрированной системой ФЭС — медицинская реабилитация.
Введение
Изначально экзоскелет нижних конечностей разрабатывался как устройство для замещения (протезирования) отсутствующей двигательной и опорной функции нижних конечностей у больных с полным нижним параличом. Большинство существующих экзоскелетов созданы именно для этой категории больных.
В настоящее время экзоскелеты нижних конечностей разрабатываются и производятся несколькими десятками компаний в разных странах мира. Если первые модели экзоскелетов осуществляли только приведение ног пациента в движение и были предназначены для больных с полным нижним параличом, то дальнейшая эволюция этих устройств связана с расширением нозологии.
По нашему мнению, действительно реабилитационным экзоскелет следует считать только в том случае, если он может применяться не только для замещения, протезирования функции, но и для ее восстановления. Исследования последних лет показали, что экзоскелеты могут применяться эффективно при различной неврологической и ортопедической патологии (последствия перенесенного церебрального инсульта, состояние после травм опорно-двигательной системы и ряд других) [1–3]. В данном случае используются возможности экзоскелета к выполнению образца движений, близкого к нормативному. Но если экзоскелет снабдить специальной системой восстановления двигательной активности, это не только существенно повысит эффективность реабилитации, но и расширит возможную сферу применения.
Для восстановления движений разработана специальная технология — функциональная электрическая стимуляция (ФЭС). Это метод, использующий курсовую терапию импульсами электрического тока для принудительного действия стимулируемой мышцы. Особенность ФЭС — электростимуляция мышц возможна только при условии движения, пусть и пассивного, сегментов тела, производится во время движений (обычно циклических) в момент, когда данная мышца в норме должна работать [4]. Мышцы активируются в результате стимуляции двигательной точки мышцы (т.е. сохраненного нижнего мотонейрона), электростимуляция сочетается с выполнением целевых упражнений [5, 6].
Наиболее часто ФЭС применяется у пациентов с травмой (полным или частичным повреждением) спинного мозга. Широкий спектр систем ФЭС используется у лиц с данной патологией для обучения вставанию, нахождению в вертикальном положении [7, 8], а также в качестве удерживающей системы при ходьбе [9–11].
До настоящего времени ФЭС остается методикой, технически сложно реализуемой. Однако именно эта методика хорошо сочетается с возможностями реабилитационного применения экзоскелета, поскольку он помогает осуществлять во время ходьбы дозированные циклические движения.
В последние годы активно проводятся исследования по оснащению экзоскелетов системой ФЭС [12–16], но на медицинском рынке практически нет готовых систем ФЭС, которые могли бы использоваться вместе с экзоскелетом. Кроме экзоскелетов разрабатываются активные ортезы, также включающие ФЭС [17, 18]. По сути, ортезы — это часть экзоскелета (как правило, для коленного сустава).
Плюсы совместного применения ФЭС и экзоскелета очевидны, поэтому работы по оснащению системами ФЭС экзоскелетов были начаты непосредственно с появлением последних. До появления экзоскелетов ФЭС оснащались их предшественники: такие системы, как Locomat (Hocoma, Швейцария) и ее аналоги, представляющие собой стационарные экзоскелеты. Опыт признан удачным, и последующие работы ориентированы на оснащение ФЭС мобильных систем, включая активные ортезы.
Тем не менее пока только один экзоскелет Ekso GT (Ekso Bionics, США) имеет опцию дооснащения системой ФЭС стороннего производителя.
По этой причине была разработана оригинальная система ФЭС для применения в составе реабилитационных экзоскелетонных устройств.
Цель исследования — разработать систему функциональной электрической стимуляции, которая изначально может быть интегрирована в экзоскелет нижних конечностей для обеспечения наилучшей совместимости и синхронизации ее работы с узлами экзоскелета при совершении пациентом движений.
Материалы и методы
На основе обобщения данных литературы и собственного опыта создания подобных систем [19] разработана концепция системы ФЭС с возможностью интеграции ее в экзоскелет нижних конечностей. Система состоит из 2 либо 4 каналов ФЭС, каждый из которых реализован в виде печатной платы (рис. 1). Каналы ФЭС с помощью подключаемых к выходному коннектору нательных электродов позволяют подавать стимулирующий ток на целевые мышцы пациента. Каждый канал ФЭС имеет следующие технические характеристики выходного сигнала:
стимулирующий импульс — П-образный, с отвесными фронтами;
амплитуда по току — 0–100 мА с шагом 1 мА;
частота импульса — 25–100 Гц с шагом 1 Гц;
длительность импульса — 2–500 мс с шагом 1 мс (для двухполярного сигнала длительность симметрична).

|
Рис. 1. Внешний вид платы канала системы функциональной электростимуляции мышц: 1 — коннектор UART-интерфейса управления; 2 — выходное гнездо для подключения нательных электродов к системе ФЭС; 3 — коннектор питания платы ФЭС; 4 — коннектор подключения нательных электродов к системе регистрации электромиографической активности |
Для тестирования работы канала ФЭС была собрана экспериментальная установка (рис. 2).

|
Рис. 2. Внешний вид экспериментальной установки для тестирования системы ФЭС: 1 — осциллограф; 2 — плата системы ФЭС; 3 — плата преобразователя интерфейса USB/UART со встроенным источником питания; 4 — соединительные линии для связи входа осциллографа и выхода платы ФЭС |
Плата системы ФЭС подключена к компьютеру через USB-порт, а выход системы — к измерительному входу осциллографа. На осциллографе использованы функции измерения амплитуды и измерения частоты.
Далее была проведена серия экспериментов по записи стимулирующих сигналов при различной вариации параметров в минимальном и максимальном граничных пределах.
Для тестирования возможности достижения эффективного тока стимуляции на электроды ФЭС установлена балластная нагрузка с сопротивлением 270 Ом. После визуальной проверки правильности всех соединений было подано питание и проведена серия экспериментов по проверке эффективного тока стимуляции при различных значениях амплитуды напряжения, частоты генерации и ширине импульса стимуляции.
Результаты
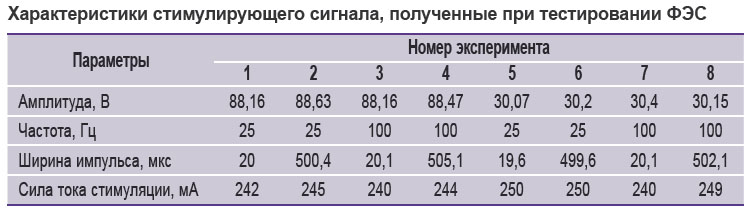
Результаты экспериментальных измерений приведены в таблице.
|
Характеристики стимулирующего сигнала, полученные при тестировании ФЭС |
Полученные данные экспериментов показали, что измеренные параметры находятся в допустимых диапазонах значений для этих параметров.
Форму ФЭС-импульса и последовательность импульсов регистрировали осциллографом. На рис. 3 показан результат работы канала при установленных параметрах: амплитуде 90 В, частоте следования импульсов 100 Гц и ширине импульса 500 мкс.

|
Рис. 3. Осциллограмма пачки импульсов при амплитуде 90 В, частоте следования импульсов 100 Гц и ширине импульса 500 мкс |
Отвесный характер фронтов сигнала соответствует требованию максимально быстрой реполяризации и позволяет получить максимальный клинический эффект.
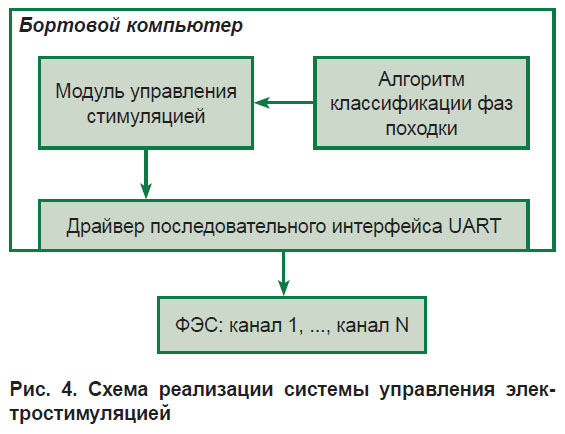
Для проверки работы система ФЭС была интегрирована в созданную ранее конструкцию экзоскелета [20]. Электростимуляция проводится посредством специальных накожных электродов. Сами электроды в зависимости от клинического статуса больного могут располагаться в том числе и в местах фиксации манжет экзоскелета и могут повреждаться ими. К электродам подключены кабели, которые также могут повреждаться манжетами. Кроме того, кабели, работая с отделенным от экзоскелета устройством, могут пострадать во время работы приводов. Другой существенной причиной необходимости интеграции системы ФЭС в экзоскелет является требование обязательной синхронизации работы ФЭС с движениями экзоскелета с высокой точностью и в реальном режиме времени. Схема реализации системы электростимуляции приведена на рис. 4.
|
Рис. 4. Схема реализации системы управления электростимуляцией |
Система поддержки электростимуляции включает несколько одноканальных блоков (поддерживается от 2 до 4 каналов стимуляции) и программного обеспечения, управляющего процессом стимуляции. Блоки ФЭС размещаются на корпусе экзоскелета рядом с местом крепления электродов для устранения возможных утечек, уменьшения уровня электромагнитных помех в процессе стимуляции и сокращения длины соединительных кабелей.
Программное обеспечение системы управления стимуляцией выполняется под управлением операционной системы семейства Linux на одноплатном бортовом компьютере экзоскелета. Процесс управления стимуляцией осуществляется следующим образом. Алгоритм классификации определяет фазы походки до данным электромиографии и передает на модуль управления стимуляцией синхросигнал. Этот синхросигнал является ключевым для всех ФЭС-каналов одной стороны (левой или правой). Таким образом, имеются отдельные синхросигналы для циклов шага левой и правой нижних конечностей. Синхросигнал определяет момент начала цикла шага данной ноги. Программирование работы каждого канала ФЭС предусматривает установку следующих параметров:
частоты импульсов;
амплитуды импульсов;
длительности отдельного импульса;
времени начала работы канала относительно начала цикла шага;
времени окончания работы канала относительно начала цикла шага.
Первые три параметра определяют интенсивность воздействия и настраиваются с учетом ощущений пациента при пробной работе канала. Интенсивность должна быть такой, чтобы происходило видимое сокращение стимулируемой мышцы, но в пределах терпимых болевых ощущений. Последние два параметра определяют временную программу работы канала. Временная программа работы канала для стимулируемой мышцы устанавливается по программе стимуляции различных мышц в соответствии с данными, опубликованными ранее [19].
Включение и выключение каналов ФЭС происходит по команде оператора. После включения каналы ФЭС работают автоматически в соответствии с установленными параметрами и синхросигналом.
Заключение
Расширение сферы применения экзоскелетов предполагает не только простое воспроизведение ходьбы как локомоции, т.е. протезирование функции, но и восстановление утраченных возможностей к самостоятельному передвижению. При этом использование только дополнительного привода оказывается не всегда достаточным. С целью усиления реабилитационного эффекта экзоскелеты оснащают дополнительной системой функциональной электростимуляции, что способно значительно усилить клинический эффект. Однако до настоящего времени не существует примеров с интегрированной собственной системой функциональной электростимуляции, а использование внешних систем имеет различные ограничения.
Нами предложено решение, которое заключается в разработке оригинальной системы функциональной электростимуляции, предназначенной для интегрирования в экзоскелет. Техническая реализация такого решения представляется перспективной задачей и требует дальнейшего его совершенствования.
Финансирование исследования. Работа выполнена при поддержке Министерства образования и науки РФ в рамках Федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014–2020 годы». Соглашение о предоставлении субсидии №14.578.21.0107 от 27.10.2015 г. (уникальный идентификатор проекта RFMEFI57815X0107).
Конфликт интересов. У авторов нет конфликта интересов.
Литература
- Hill D., Holloway C.S., Morgado Ramirez D.Z., Smitham P., Pappas Y. What are user perspectives of exoskeleton technology? A literature review. Int J Technol Assess Health Care 2017; 33(2): 160–167, https://doi.org/10.1017/s0266462317000460.
- Fukaya T., Mutsuzaki H., Yoshikawa K., Sano A., Mizukami M., Yamazaki M. The training effect of early intervention with a hybrid assistive limb after total knee arthroplasty. Case Rep Orthop 2017; 2017: 6912706, https://doi.org/10.1155/2017/6912706.
- McGibbon C.A., Brandon S.C.E., Brookshaw M., Sexton A. Effects of an over-ground exoskeleton on external knee moments during stance phase of gait in healthy adults. Knee 2017; 24(5): 977–993, https://doi.org/10.1016/j.knee.2017.04.004.
- Thrasher T.A., Popovic M.R. Functional electrical stimulation of walking: function, exercise and rehabilitation. Ann Readapt Med Phys 2008; 51(6): 452–460, https://doi.org/10.1016/j.annrmp.2008.05.006.
- Dimitrijevic M.M., Dimitrijevic M.R. Clinical elements for the neuromuscular stimulation and functional electrical stimulation protocols in the practice of neurorehabilitation. Artif Organs 2002; 26(3): 256–259, https://doi.org/10.1046/j.1525-1594.2002.06946.x.
- Bijak M., Rakos M., Hofer C., Mayr W., Strohhofer M., Raschka D. Stimulation parameter optimization for FES supported standing up and walking in SCI patients. Artif Organs 2005; 29(3): 220–223, https://doi.org/10.1111/j.1525-1594.2005.29039.x.
- Matjacic Z., Bajd T. Arm-free paraplegic standing — part II: experimental results. IEEE Trans Rehabil Eng 1998; 6(2): 139–150, https://doi.org/10.1109/86.681179.
- Holderbaum W., Hunt K.J., Gollee H. H∞ robust control design for unsupported paraplegic standing: experimental evaluation. Control Eng Pract 2002; 10(11): 1211–1222, https://doi.org/10.1016/S0967-0661(02)00082-5.
- Thrasher T.A., Flett H.E., Popovic M.R. Gait training regimen for incomplete spinal cord injury using functional electrical stimulation. Spinal Cord 2006; 44(6): 357–361, https://doi.org/10.1038/sj.sc.3101864.
- Kralj A., Bajd T., Turk R. Enhancement of gait restoration in spinal injured patients by functional electrical stimulation. Clin Orthop Relat Res 1988; 1998(233): 34–43, https://doi.org/10.1097/00003086-198808000-00006.
- Graupe D., Davis R., Kordylewski H., Kohn K.H. Ambulation by traumatic T4-12 paraplegics using functional neuromuscular stimulation. Crit Rev Neurosurg 1998; 8(4): 221–231, https://doi.org/10.1007/s003290050081.
- Mazzoleni S., Battini E., Rustici A., Stampacchia G. An integrated gait rehabilitation training based on functional electrical stimulation cycling and overground robotic exoskeleton in complete spinal cord injury patients: preliminary results. IEEE Int Conf Rehabil Robot 2017; 2017: 289–293, https://doi.org/10.1109/icorr.2017.8009261.
- Ha K.H., Murray S.A., Goldfarb M. An approach for the cooperative control of FES with a powered exoskeleton during level walking for persons with paraplegia. IEEE Trans Neural Syst Rehabil Eng 2016; 24(4): 455–466, https://doi.org/10.1109/TNSRE.2015.2421052.
- Alibeji N.A., Kirsch N.A., Sharma N. A muscle synergy-inspired adaptive control scheme for a hybrid walking neuroprosthesis. Front Bioeng Biotechnol 2015; 3: 203, https://doi.org/10.3389/fbioe.2015.00203.
- del-Ama A.J., Gil-Agudo A., Pons J.L., Moreno J.C. Hybrid FES-robot cooperative control of ambulatory gait rehabilitation exoskeleton. J Neuroeng Rehabil 2014; 11(1): 27, https://doi.org/10.1186/1743-0003-11-27.
- Ha K.H., Quintero H.A., Farris R.J., Goldfarb M. Enhancing stance phase propulsion during level walking by combining FES with a powered exoskeleton for persons with paraplegia. Conf Proc IEEE Eng Med Biol Soc 2012; 2012: 344–347, https://doi.org/10.1109/embc.2012.6345939.
- Chang S.R., Kobetic R., Audu M.L., Quinn R.D., Triolo R.J. Powered lower-limb exoskeletons to restore gait for individuals with paraplegia — a review. Case Orthop J 2015; 12(1): 75–80.
- Chang S.R., Nandor M.J., Li L., Kobetic R., Foglyano K.M., Schnellenberger J.R., Audu M.L., Pinault G., Quinn R.D., Triolo R.J. A muscle-driven approach to restore stepping with an exoskeleton for individuals with paraplegia. J Neuroeng Rehabil 2017; 14(1): 48, https://doi.org/10.1186/s12984-017-0258-6.
- Витензон А.С., Петрушанская К.А., Скворцов Д.В. Руководство по применению метода искусственной коррекции ходьбы и ритмических движений посредством программируемой электростимуляции мышц. М; 2004; 284 с.
- Mineev S.A., Novikov V.A., Kuzmina I.V., Shatalin R.A., Grin I.V. Goniometric sensor interface for exoskeleton system control device. Biomed Eng 2016; 49(6): 357–361, https://doi.org/10.1007/s10527-016-9566-6.








