Нейрокомпьютерные интерфейсы с корковыми имплантатами для компенсации двигательной и коммуникативной функций: обзор последних достижений
Нейрокомпьютерные интерфейсы позволяют осуществлять обмен данными между мозгом и внешним техническим устройством в обход мышечной системы. Клинические исследования инвазивных нейроинтерфейсных технологий проводятся уже более 20 лет. Постоянно совершенствуются подходы к обработке нейронального сигнала для повышения качества управления внешними техническими устройствами. На сегодняшний день нейрокомпьютерные интерфейсы с внутрикорковыми датчиками позволяют полностью парализованным пациентам управлять роботизированными конечностями для самообслуживания, пользоваться компьютером или планшетом, набирать текст и воспроизводить речь с оптимальной скоростью. Исследования инвазивных нейроинтерфейсов предоставляют новые данные о функционировании центральной нервной системы. В последние годы в этой области ежегодно происходят прорывные открытия.
В данном обзоре проанализированы результаты клинических испытаний нейрокомпьютерных интерфейсов с внутрикорковыми датчиками, представлены информация об этапах развития данной технологии и основные достижения, связанные с ней.
Введение
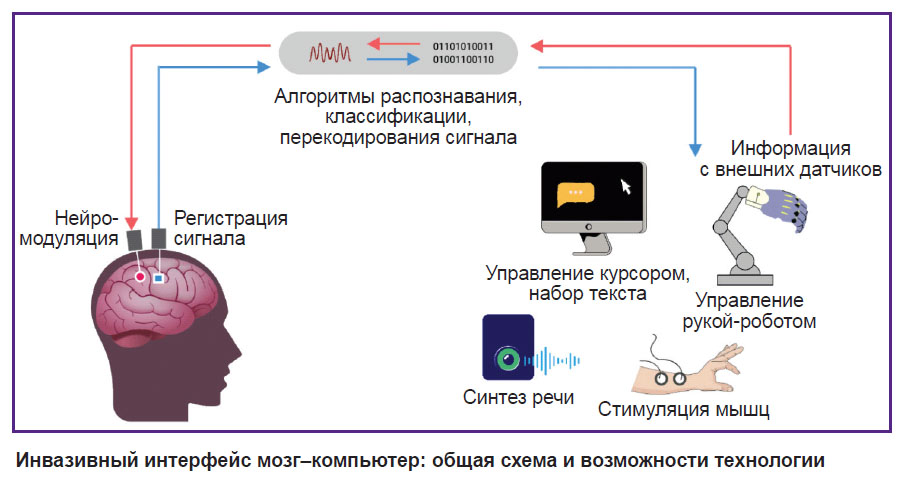
Нейрокомпьютерные интерфейсы (нейроинтерфейсы, интерфейсы мозг–компьютер, ИМК) обеспечивают прямой информационный обмен между мозгом и компьютером, с передачей данных на внешние технические устройства. Такие интерфейсы включают электроды для регистрации сигналов активности мозга, систему обработки сигналов (фильтрацию, выделение особенностей, расшифровку, классификацию и преобразование в управляющую команду), а также управляемое внешнее техническое устройство [1]. В случае инвазивных ИМК система может передавать сигнал и в обратном направлении: с внешних датчиков на нейроимплантаты в коре головного мозга, осуществляя тем самым нейромодуляцию (см. рисунок) [2].
|
Инвазивный интерфейс мозг–компьютер: общая схема и возможности технологии |
В последние годы появилась обширная доказательная база для применения неинвазивных ИМК в реабилитации после инсульта [3–13]. Регистрация сигнала в таких интерфейсах осуществляется с поверхности головы, чаще всего с помощью электроэнцефалографических (ЭЭГ) датчиков или спектроскопии в ближней инфракрасной области (БИКС) во время тренировки представления движения [14, 15]. Неинвазивные ИМК позволяют проводить тренировки представления движения для стимуляции нейропластичности и восстановления двигательной функции при наличии у пациента реабилитационного потенциала [10–13].
Сигналами, регистрируемыми в инвазивных ИМК, служат потенциал локального поля (при экстракортикальных или внутрикорковых датчиках) и спайковая активность нейронов (при внутрикорковых датчиках) [16]. Инвазивные ИМК, несмотря на высокую стоимость разработок и исследований, а также необходимость хирургического вмешательства, являются безальтернативными средствами взаимодействия с внешним миром для полностью парализованных пациентов с отсутствием речи, но сохранными когнитивными функциями при тетраплегии и анартрии, при синдроме запертого человека (locked-in) различной этиологии. В отличие от неинвазивных ИМК, доказательная база по которым включает много рандомизированных клинических исследований и их метаанализов, клиническое применение инвазивных нейроинтерфейсов ограничено лишь несколькими десятками случаев. Однако практически каждый новый случай представляет собой прорывное научное открытие, а посвященные этой теме статьи публикуются в наиболее высокорейтинговых журналах [17–27].
В настоящее время развиваются мало- или минимально инвазивные ИМК с экстракортикальными [17, 26, 28, 29] или эндоваскулярными датчиками [30, 31], однако больший научный интерес представляют достижения в области разработок нейроинтерфейсов с внутрикорковыми датчиками [2, 32].К очевидным преимуществам таких ИМК относятся: 1) получение сигналов активности головного мозга с наиболее высоким временны´м и пространственным разрешением; 2) высокое соотношение сигнал/шум; 3) наиболее близкое или точное размещение электродов в целевые области головного мозга; 4) проведение сигнала в обратном направлении — от внешних датчиков в кору головного мозга [2, 32]. Благодаря высокому, в один нейрон, пространственному разрешению регистрации сигнала или нейромодуляции внутрикорковые нейроимплантаты позволяют получать новые данные о локализации отдельных функций в коре головного мозга и особенностях функционирования ее нейронов [16, 24, 25, 33, 34].
Цель данного обзора — проанализировать и описать возможности нейрокомпьютерных интерфейсов с внутрикорковыми имплантатами в реабилитации пациентов с тяжелыми двигательными нарушениями.
Методология поиска литературы
Поиск литературы был проведен в системе MEDLINE (PubMed) с использованием поискового запроса: ((invasive[tiab] OR intracortical[tiab]) AND (brain-computer[tiab] OR brain-machine[tiab] OR “neural interface*”[tiab]) OR intracortical implant*[tiab]) AND humans[mh]. Дополнительно выполнен поиск литературы в сиcтеме eLIBRARY.RU по ключевым словам: «интерфейс мозг–компьютер», «нейрокомпьютерный интерфейс», «нейроинтерфейс». Дата проведения поиска — 15.07.2023 г.
Для анализа выбраны статьи по следующим критериям: 1) статьи или письма в редакцию, опубликованные в рецензируемых научных журналах; 2) публикации, посвященные применению инвазивных ИМК с внутрикорковыми датчиками у людей; 3) статьи, где целью применения ИМК является компенсация двигательных функций или речи.
Доклинические работы и первые эксперименты
Первые исследования применения имплантируемых датчиков для регистрации сигналов из коры головного мозга обезьян датируются 1960-ми гг. [35, 36]. В 1970-е гг., также в экспериментах с обезьянами, удалось создать систему преобразования корковых сигналов в движение курсора в режиме реального времени [37, 38]. Животные могли управлять курсором за счет модуляции сигналов двигательной коры, даже не совершая реального движения. В конце 1990-х и начале 2000-х гг. в доклинических исследованиях применяли системы ИМК с роботизированными конечностями в качестве внешнего управляемого устройства [39–47]. С помощью этих технологий животные могли осуществлять самокормление. После начала клинических испытаний инвазивных ИМК и до настоящего времени продолжаются исследования на животных для проверки ряда научных гипотез и поиска новых подходов к обработке сигналов [48–57].
Считается, что первый эксперимент по управлению внешним устройством сигналами с нейроимплантата головного мозга человека был проведен в 1963 г. британским нейрохирургом Греем Уолтером [58, 59]. Исследователь хотел проверить гипотезу о том, что намерение совершить действие сопровождается определенными всплесками нейрональной активности. Пациентам, которым ранее по медицинским показаниям были имплантированы электроды в моторную кору головного мозга, предлагалось переключать слайды проектора нажатием на кнопку. Однако кнопка была муляжом, о чем пациенты не знали. На самом деле слайды переключались усиленным сигналом от нейроимплантата. Сами пациенты были поражены тем, что слайд-проектор предвосхищает их действия.
Первые клинические испытания, нейротрофический электрод
В конце 1990-х гг. исследователи под руководством P.R. Kennedy впервые вживили нескольким пациентам с тетраплегией нейротрофические электроды для длительной регистрации корковых сигналов [60–62]. Такие электроды состояли из двух изолированных золотых проводов внутри стеклянного конуса длиной 1,5 мм и диаметром 0,1–0,4 мм, содержащего аутологичные нейротрофические факторы. Система была беспроводной [63]. Спустя 1,5–3 мес после имплантации отростки нейронов коры головного мозга прорастали в кончик электрода, где происходила их миелинизация. Через несколько недель после имплантации можно было регистрировать первые сигналы, а в течение 1,5–3 мес сигнал становился стабильным. С помощью нейротрофических электродов удалось добиться регистрации стабильного сигнала как минимум в течение четырех с лишним лет [64].
Первую имплантацию такого нейротрофического электрода провели женщине на поздней стадии бокового амиотрофического склероза (БАС) [60]. Локализация места имплантации — зона представительства кисти в моторной коре правого полушария — была определена с помощью функциональной магнитно-резонансной томографии (фМРТ) во время представления движений рук и представления артикуляции речи. Практически сразу после стабилизации сигнала нейрональной активности пациентка научилась управлять движением курсора в вертикальной плоскости. Имплантат функционировал 76 дней — вплоть до последних дней жизни пациентки. Затем нейротрофический электрод был вживлен еще нескольким пациентам с тетраплегией и анартрией: в 1998 г. — 53-летнему мужчине через 3 мес после стволового инсульта [61, 62], в 1999 г. — 40-летнему мужчине с 12-летним анамнезом прогрессирующей митохондриальной миопатии [62] и в 2004 г. — 26-летнему мужчине со стволовым инсультом 5-летней давности [64, 65]. Первый из них с помощью инвазивного интерфейса смог управлять движением курсора в разных направлениях на экране, использовать функцию нажатия («кликать» по цели) и управлять пальцами виртуальной руки. Наиболее интересным наблюдением для исследователей стала способность управлять курсором без необходимости представления движений или каких-то других, типичных для головного мозга, парадигм: пациент управлял курсором за счет своей воли. Исследователи связали этот феномен с нейропластичностью, а зону имплантации электрода назвали «корковым представительством курсора» («cursor cortex») [61]. Однако для усвоения навыка набора текста пациенту потребовалось полгода после стабилизации регистрируемого сигнала, а достигнутая скорость составляла 3 знака в минуту. С такой же скоростью уже в то время можно было набирать текст с помощью неинвазивных ИМК.
У пациента с митохондриальной миопатией в период проведения эксперимента развилось серьезное нарушение когнитивных функций из-за прогрессирования заболевания, однако он смог управлять курсором в одном направлении [62].
В 2004 г. с целью расшифровки нейронной активности, связанной с речью, нейротрофический электрод был имплантирован 26-летнему пациенту со стволовым инсультом [64, 65]. Местом имплантации была область коры, задействованная в планировании произношения звуков. В данном ИМК с декодером на основе фильтра Калмана нервные сигналы, генерируемые во время попытки произнести звуки, использовались для управления синтезатором речи. Точность воспроизведения гласных звуков, достигнутая пациентом за 25 тренировочных сеансов, составляла 70%.
Таким образом, в исследованиях под руководством P.R. Kennedy была предложена методология определения области коры для имплантации датчика у пациентов с плегией и анартрией. Впервые на длительный срок в кору головного мозга человека были вживлены регистрирующие электроды, продемонстрирована их безопасность и возможность функционирования для управления курсором, аватаром руки и синтезатором речи за счет произвольной модуляции корковых сигналов даже спустя годы после развития плегии. Несмотря на ограниченную функциональность первых инвазивных ИМК, в конце 1990-х гг. была показана возможность создания альтернативных средств коммуникации и самообслуживания для пациентов с тетраплегией [60–62, 64, 65].
Ранние исследования проекта «BrainGate»
В начале 2000-х гг. началась серия клинических испытаний инвазивных ИМК в рамках проекта «BrainGate». В качестве нейроимплантата использовали массив из 100 кремниевых микроэлектродов (96 активных) длиной 1,5 мм, расположенных по схеме 10×10 на платформе размером 4×4 мм (Blackrock Microsystems, Солт-Лейк-Сити, Юта, США) — так называемая Ютовская проба [66]. Ранее микроимплантат изучали в доклинических испытаниях [67–70].
Первыми пациентами, кому в 2004–2005 гг. были имплантированы датчики BrainGate, были мужчины 25 и 55 лет с травмой спинного мозга (ТСМ) на уровне четвертого шейного позвонка (по шкале Американской ассоциации спинальных повреждений — C4 ASIA A) давностью 3 и 5 лет соответственно [18, 71]. Исследователи под руководством J.P. Donoghue продемонстрировали возможность регистрации с помощью данного датчика как спайковой активности нейронов, так и потенциалов локального поля в течение 6,5 и 11 мес (для первого и второго пациента соответственно), а также способность пациентов управлять этими сигналами спустя годы после разрыва кортико-спинального тракта. Декодирующие устройства в контуре ИМК позволяли «нейронным курсором» открывать электронную почту и управлять телевизором. Первый пациент успешно достигал «нейронным курсором» 73–95% целей, среднее время достижение цели составляло 2,5 с [18, 71].
В дальнейших исследованиях с участием пациентов со стволовым инсультом или с БАС были оптимизированы алгоритмы обработки сигнала, что позволило сократить время калибровки и достичь более качественного управления курсором [72–74].
Затем было показано, что даже через 1000 дней (2,7 года) после имплантации микроэлектродная матрица продолжала функционировать: пациентка демонстрировала стабильно высокие показатели качества управления в течение пяти последовательных дней эксперимента. Частота успешного достижения цели в данном эксперименте составила 94,9% при радиальном и 91,9% — при случайном расположении целей (что в точности имитирует использование компьютерной мыши). Из 564 заданий только 37 не были выполнены в связи с истечением времени ожидания, но не из-за ошибок навигации курсором [75]. Эти результаты снизили опасения исследователей в отношении риска быстрого снижения функционирования электрода из-за тканевой реакции на имплантат. На настоящий момент уже показана производительность нейроимплантатов и при большем сроке службы [19].
Управление роботизированной рукой
Последующие работы преимущественно были связаны с управлением внешней роботизированной многосуставной рукой для реализации функционально-значимых движений (табл. 1). Этот тип задания заключался в управлении объектом в трехмерном пространстве с изогнутыми траекториями и последовательными действиями в разных суставах. По сравнению с управлением курсором требовался более точный контроль скорости и объема движения, выверенное позиционирование и планирование команд.
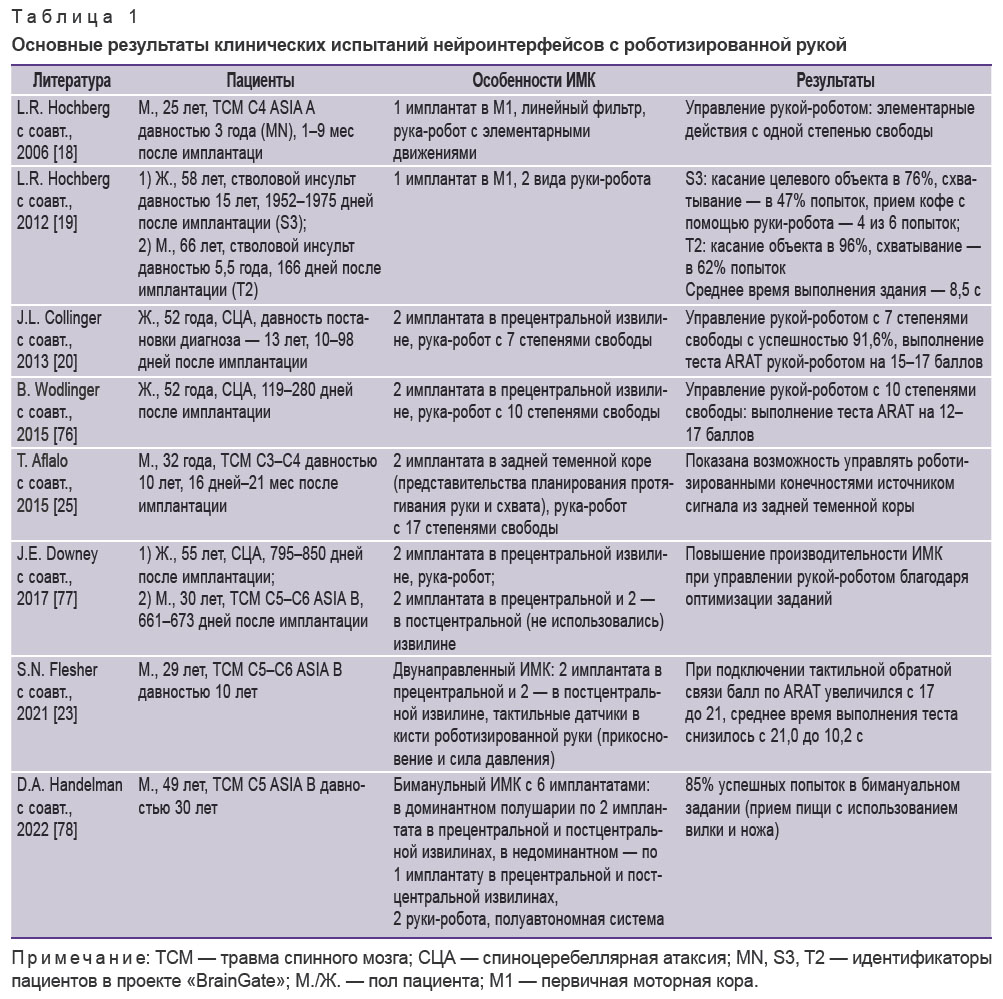 |
Таблица 1. Основные результаты клинических испытаний нейроинтерфейсов с роботизированной рукой |
В эксперименте 2012 г. два пациента с тетраплегией, управляя многосуставной рукой-роботом, достигали и схватывали целевой объект в 47 и 62% попыток [19]. Управляя рукой-роботом, участница эксперимента смогла поднести стакан с кофе ко рту и отпить его из трубочки. Благодаря ИМК она впервые за 15 лет самостоятельно совершила действие по самообслуживанию. Несмотря на 5-летний срок имплантации, электродная матрица регистрировала сигналы, достаточные для управления роботом, однако уже наблюдалось снижение их амплитуды и уменьшение активных электродных каналов.
В другом исследовании [20] пациентке со спиноцеребеллярной атаксией было имплантировано 2 датчика в корковые представительства мышц пальцев и предплечья доминантного полушария. Конструкция антропоморфной роботизированной руки позволяла выполнять движения с семью степенями свободы. Уже на второй день обучения пациентка смогла свободно двигать рукой-роботом в трехмерном рабочем пространстве. В течение последующих 13 нед качество управления последовательно улучшалось. Движения были плавными и скоординированными, со скоростью, приближенной к скорости движения руки здорового человека. Уровень контроля роботом позволял выполнять тонкие корректирующие движения и манипуляции с шариками, кубиками и колышками разных размеров. Успешное достижение цели в среднем происходило в 92% попыток, а при выполнении теста ARAT (Action Research Arm Test — тест для оценки движений руки при центральном парезе) с помощью руки-робота было набрано 17 баллов из 27 возможных.
В последующих клинических экспериментах исследователи совершенствовали архитектуру системы ИМК и алгоритмы обработки сигнала, что позволило управлять роботизированной рукой с 10 степенями свободы [76], улучшить качество захвата объекта [77, 79] и сократить время калибровки системы с 10 до 3 мин [80]. Кроме того, были определены дополнительные зоны коры для имплантации электродов, являющиеся источниками сигналов, которые связаны с планированием движения [25].
В одной из последних работ конструкция ИМК включала 2 роботизированные руки для выполнения сложных бимануальных заданий [78]. Для управления этой системой пациенту с ТСМ давностью 30 лет было имплантировано 6 электродных матриц в оба полушария головного мозга. Для приема пищи и манипулирования с вилкой и ножом использовалась полуавтоматическая система: часть отдельных движений были запрограммированы, а часть — управлялись сигналами мозга. Пациент успешно выполнил 85% бимануальных задач.
Интерфейс мозг–компьютер с электростимуляцией парализованных мышц
Электростимуляция собственных мышц за счет модуляции двигательных корковых сигналов обеспечивает более естественную для двигательной системы обратную связь [81]. На настоящий момент проведено несколько исследований инвазивных ИМК с функциональной электростимуляцией (ФЭС) мышц.
Сперва была продемонстрирована способность пациента с длительной тетраплегией управлять через ИМК определенными движениями виртуальной руки за счет моделирования воздействия на отдельные мышцы. При имитации движения учитывались расчетные параметры сократительной силы мышц и масса руки [82].
В последующих работах с применением реальной ФЭС действительно удалось добиться функциональных движений руки, управляемых ИМК [83, 27]. В первой из них участник эксперимента с ТСМ на уровне C5–C6 и давностью тетраплегии более четырех лет достиг контроля шести различных движений запястья и кисти собственной руки, а также смог взять бутылку, перелить ее содержимое в стакан, отпустить бутылку и перемешать содержимое стакана палочкой в среднем за 42 с [83]. В данном исследовании для декодирования нейрональных сигналов применялись алгоритмы машинного обучения. Электрическая стимуляция парализованных мышц осуществлялась с помощью 130 электродов в гибком рукаве, обертывающем правое предплечье. Обучение длилось 15 мес (до трех тренировок в неделю). Средняя точность управления составила 70%. Клиническая оценка показала, что при использовании ИМК–ФЭС двигательные возможности пациента соответствовали уровню поражения спинного мозга C7–T1, то есть на 2 позвонка ниже реального повреждения. Данное улучшение является значимым в отношении снижения бремени ухода за пациентами с ТСМ, поскольку большинству пациентов с уровнями C5 и C6 требуется помощь в повседневной жизни, в то время как пациенты с уровнями C7–T1 могут жить более независимо.
В следующем исследовании пациент с последствиями высокой ТСМ (С4 ASIA A) с помощью ИМК–ФЭС смог успешно выпить чашку кофе и принять пищу [27]. Обучение проводилось 18 нед в среднем по 8 ч в неделю. Система ФЭС включала 36 чрескожных электродов для стимуляции мышц кисти, предплечья и плеча. Задание «выпить кофе» требовало совершить ряд последовательных действий: 1) разогнуть локоть; 2) разжать кисть; 3) взять чашку; 4) согнуть локоть, чтобы поднести ее ко рту; 5) сделать глоток через трубочку; 6) разогнуть локоть, чтобы вернуть чашку; 7) ослабить хватку. Эти процессы занимали суммарно от 20 до 40 с, и из 12 попыток 11 были успешными.
Двунаправленный интерфейс мозг–компьютер–мозг
Двунаправленный интерфейс мозг–компьютер–мозг позволяет не только регистрировать сигналы коры головного мозга, но и модулировать ее активность. Такой интерфейс дополнительно включает внешние тактильные датчики и электроды, имплантированные в соматосенсорную кору. Сенсорная обратная связь имеет ключевое значение для большинства двигательных задач, предоставляя информацию о расположении конечности в пространстве, о прикосновении к объекту, о характеристиках этого объекта. Сенсорная и моторная функции не существуют независимо друг от друга: головной мозг создает сложные двигательные планы и сравнивает желаемый результат с сенсорной обратной связью, чтобы внести соответствующие коррективы в движение [84].
Преимущества двунаправленного ИМК были продемонстрированы в работе [23]. Пациенту с ТСМ С5–С6 были имплантированы по две электродные матрицы в двигательную и соматосенсорную кору доминантного полушария, а в кисть роботизированной руки в контуре ИМК встроены датчики прикосновения и давления. Сначала пациент обучился управлять рукой-роботом только с использованием зрительной обратной связи. При подключении тактильной обратной связи уже в течение первых четырех сессий улучшились качество и скорость движений роботизированной руки. Количественно это было оценено с помощью теста ARAT, средний балл по которому увеличился с 17 до 21, а скорость выполнения всего теста снизилась более чем в 2 раза [23].
Высокопроизводительные коммуникационные нейроинтерфейсы
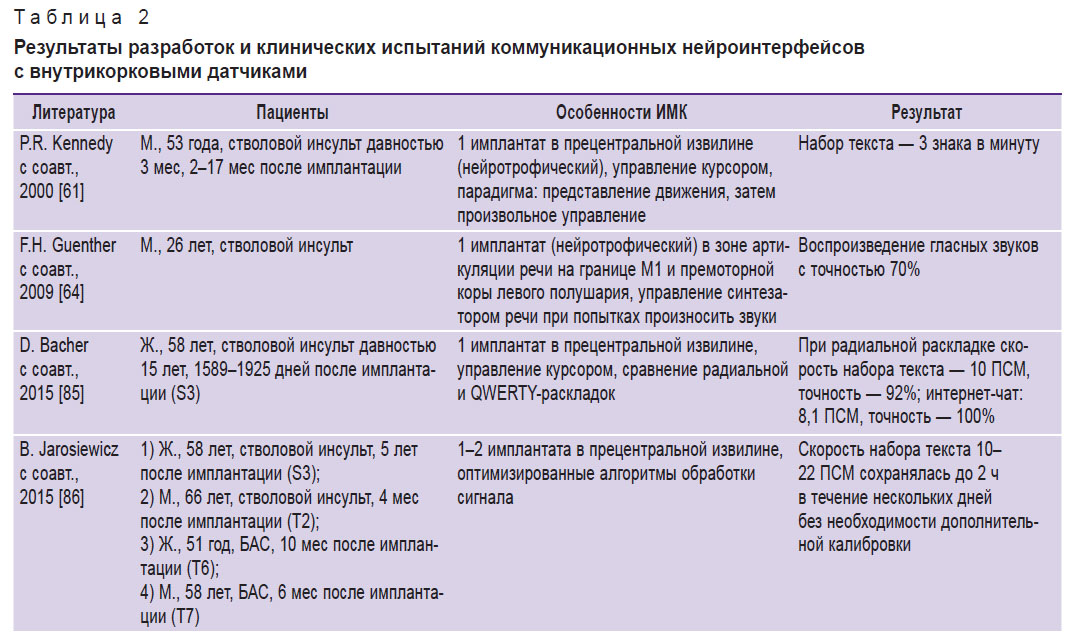
Благодаря постоянному прогрессу в точности, скорости и стабильности управления нейрокурсором, пациенты с имплантированными корковыми датчиками ИМК могут набирать текст со скоростью, достаточной для коммуникации. Однако последние достижения в области коммуникационных нейроинтерфейсов позволяют производить текст или речь без использования виртуальной клавиатуры. За историю разработок коммуникационных нейроинтерфейсов с внутрикорковыми датчиками (в период 2000–2023 гг.) скорость воспроизведения ими текста увеличилась с 3 знаков в минуту [61], что сопоставимо с эффективностью ЭЭГ–ИМК, до 60 слов в минуту [24], что приближено к скорости речи здорового человека (табл. 2).
|
Таблица 2. Результаты разработок и клинических испытаний коммуникационных нейроинтерфейсов с внутрикорковыми датчиками |
Сначала для повышения производительности коммуникационных ИМК с управлением «нейрокурсором» была оптимизирована раскладка клавиатуры. Радиальная раскладка позволила повторить текст в задании на копирование со средней скоростью 10 правильных символов в минуту при точности более 90% [85]. Оптимизация раскладки клавиатуры позволила увеличить точность печати на 37–65%. Данные показатели были достигнуты пациенткой с 14-летним анамнезом анартрии и тетраплегии за три обучающих сеанса и при давности имплантации датчика около 5 лет [85].
В последующих работах благодаря оптимизации подходов к обработке сигнала удалось добиться более стабильного качества управления без необходимости регулярной калибровки [86] и повышения средней скорости набора текста до 39 корректных знаков (8 слов) в минуту; максимально — 40,5 корректных знаков (9 слов) в минуту без подключения функции автокоррекции [79, 87]. Достигнутая скорость печати уступала показателям коммуникации здорового человека в нормальной среде: скорость набора текста на смартфоне составляет 115 символов (12–19 слов) в минуту, а скорость речи — 90–170 слов в минуту. Тем не менее достигнутая скорость набора текста и управления курсором позволила нескольким парализованным пациентам пользоваться планшетом с обычным пользовательским интерфейсом для переписки по электронной почте и в чатах, для составления поисковых запросов и использования стандартных приложений [88].
Дальнейшего увеличения производительности коммуникационных ИМК удалось достичь, применив совершенно другую парадигму для управления сигналом. Парализованный в результате ТСМ пациент представлял, будто он с помощью шариковой ручки прописывает демонстрируемые ему слова. Система ИМК успешно обучилась распознавать каждую букву, и скорость набора текста составила 90 символов (18 слов) в минуту при точности 94% в режиме реального времени или >99% с функцией автозамены [22]. Парадигма представления написания текста оказалась принципиально проще для расшифровки сигнала, чем управление перемещением курсора для выбора букв. Исследователи [22] связывают это с тем, что написанные от руки буквы легче отличить друг от друга, чем движения от точки к точке, поскольку пространственно-временны´е паттерны нервной активности букв более разнообразны, чем прямолинейные движения.
Применение другого варианта парадигмы — представления печати пальцами руки по виртуальной клавиатуре со специальной раскладкой символов — позволило достичь точности управления 95%. Однако по скорости набора текста (14 символов в минуту) такой подход уступил печати с помощью движения «нейрокурсора» или с помощью представления написания букв ручкой [90].
В последней опубликованной на настоящее время работе, посвященной коммуникационным нейроинтерфейсам с внутрикорковыми датчиками, сообщается о разработке высокопроизводительного речевого нейропротеза [24]. Пациенту с БАС, не способному произносить внятную речь, были имплантированы 2 микроэлектродные матрицы в зону Брока и 2 — в вентральную премоторную кору доминантного полушария. Попытка пациента говорить расшифровывалась системой ИМК со скоростью 62 слова в минуту, что приближено к скорости разговорной речи в норме. После усовершенствования применяемой для распознавания слов языковой модели частота ошибок составляла 12% для словарного запаса из 125 000 слов. Это первая успешная демонстрация расшифровки большого словарного запаса с помощью нейротехнологий. Источником надежного сигнала, вопреки классическим представлениям, стала не зона Брока (область 44), а вентральная премоторная кора (область v6). По результатам данного исследования ученые обозначили два аспекта нейронного кода речи, перспективных для речевых ИМК и сохраняющихся спустя годы после наступления паралича: пространственно смешанная настройка на речевые артикуляторы, которая делает возможным точное декодирование только из небольшой области коры головного мозга, и детальное артикуляционное представление фонем.
Заключение
В последние годы наблюдается непрерывное развитие инвазивных нейроинтерфейсных технологий. Однако если разработки и исследования неинвазивных ИМК ведутся во многих странах, то клинические исследования инвазивных ИМК, ввиду необходимости существенного финансирования, могут позволить себе только несколько исследовательских групп во всем мире. Полученные ими данные ежегодно обогащают наши представления о функционировании головного мозга и открывают новые возможности для реабилитации пациентов с серьезными функциональными ограничениями. Будучи междисциплинарными, разработки и исследования инвазивных ИМК способствуют существенному прогрессу в развитии как нейробиологии, так и информационных технологий.
Дальнейшие достижения в данном направлении будут связаны с повышением скорости, точности и многофункциональности управления ИМК за счет совершенствования конструкции нейроимплантатов и повышения их биосовместимости; развитием методов получения биосигналов и улучшения алгоритмов их расшифровки и преобразования [16, 91–100]; адаптацией конструкции ИМК для домашнего применения [88, 89]. Разрабатываются также ИМК-технологии для восстановления локомоции [48] и применения в педиатрии [101], создаются зрительные и слуховые бионические протезы [102]. Ввиду постепенной интеграции ИМК-технологий в реальную клиническую практику неизбежны вопросы стандартизации и биоэтики [103].
Источники финансирования. Работа выполнена в рамках государственного задания Министерства здравоохранения Российской Федерации №122051700017-2.
Конфликт интересов отсутствует.
Литература
- Mokienko O.A., Lyukmanov R.Kh., Bobrov P.D., Suponeva N.A., Piradov M.A. Brain–computer interfaces for upper limb motor recovery after stroke: current status and development prospects (review). Sovremennye tehnologii v medicine 2023; 15(6): 63, https://doi.org/10.17691/stm2023.15.6.07.
- Zhao Z.P., Nie C., Jiang C.T., Cao S.H., Tian K.X., Yu S., Gu J.W. Modulating brain activity with invasive brain-computer interface: a narrative review. Brain Sci 2023; 13(1): 134, https://doi.org/10.3390/brainsci13010134.
- Carvalho R., Dias N., Cerqueira J.J. Brain-machine interface of upper limb recovery in stroke patients rehabilitation: a systematic review. Physiother Res Int 2019; 24(2): e1764, https://doi.org/10.1002/pri.1764.
- Baniqued P.D.E., Stanyer E.C., Awais M., Alazmani A., Jackson A.E., Mon-Williams M.A., Mushtaq F., Holt R.J. Brain-computer interface robotics for hand rehabilitation after stroke: a systematic review. J Neuroeng Rehabil 2021; 18(1): 15, https://doi.org/10.1186/s12984-021-00820-8.
- Fu J., Chen S., Jia J. Sensorimotor rhythm-based brain-computer interfaces for motor tasks used in hand upper extremity rehabilitation after stroke: a systematic review. Brain Sci 2022; 13(1): 56, https://doi.org/10.3390/brainsci13010056.
- Bai Z., Fong K.N.K., Zhang J.J., Chan J., Ting K.H. Immediate and long-term effects of BCI-based rehabilitation of the upper extremity after stroke: a systematic review and meta-analysis. J Neuroeng Rehabil 2020; 17(1): 57, https://doi.org/10.1186/s12984-020-00686-2.
- Kruse A., Suica Z., Taeymans J., Schuster-Amft C. Effect of brain-computer interface training based on non-invasive electroencephalography using motor imagery on functional recovery after stroke — a systematic review and meta-analysis. BMC Neurol 2020; 20(1): 385, https://doi.org/10.1186/s12883-020-01960-5.
- Yang W., Zhang X., Li Z., Zhang Q., Xue C., Huai Y. The effect of brain-computer interface training on rehabilitation of upper limb dysfunction after stroke: a meta-analysis of randomized controlled trials. Front Neurosci 2021; 15: 766879, https://doi.org/10.3389/fnins.2021.766879.
- Mansour S., Ang K.K., Nair K.P.S., Phua K.S., Arvaneh M. Efficacy of brain-computer interface and the impact of its design characteristics on poststroke upper-limb rehabilitation: a systematic review and meta-analysis of randomized controlled trials. Clin EEG Neurosci 2022; 53(1): 79–90, https://doi.org/10.1177/15500594211009065.
- Peng Y., Wang J., Liu Z., Zhong L., Wen X., Wang P., Gong X., Liu H. The application of brain-computer interface in upper limb dysfunction after stroke: a systematic review and meta-analysis of randomized controlled trials. Front Hum Neurosci 2022; 16: 798883, https://doi.org/10.3389/fnhum.2022.798883.
- Nojima I., Sugata H., Takeuchi H., Mima T. Brain-computer interface training based on brain activity can induce motor recovery in patients with stroke: a meta-analysis. Neurorehabil Neural Repair 2022; 36(2): 83–96, https://doi.org/10.1177/15459683211062895.
- Xie Y.L., Yang Y.X., Jiang H., Duan X.Y., Gu L.J., Qing W., Zhang B., Wang Y.X. Brain-machine interface-based training for improving upper extremity function after stroke: a meta-analysis of randomized controlled trials. Front Neurosci 2022; 16: 949575, https://doi.org/10.3389/fnins.2022.949575.
- Shou Y.Z., Wang X.H., Yang G.F. Verum versus Sham brain-computer interface on upper limb function recovery after stroke: a systematic review and meta-analysis of randomized controlled trials. Medicine (Baltimore) 2023; 102(26): e34148, https://doi.org/10.1097/md.0000000000034148.
- Frolov A.A., Mokienko O., Lyukmanov R., Biryukova E., Kotov S., Turbina L., Nadareyshvily G., Bushkova Y. Post-stroke rehabilitation training with a motor-imagery-based brain-computer interface (BCI)-controlled hand exoskeleton: a randomized controlled multicenter trial. Front Neurosci 2017; 11: 400, https://doi.org/10.3389/fnins.2017.00400.
- Lyukmanov R.K., Isaev M.R., Mokienko O.A., Bobrov P.D., Ikonnikova E.S., Cherkasova A.N., Suponeva N.A. Brain–computer interface using functional near-infrared spectroscopy for post-stroke motor rehabilitation: case series. Ann Clin Exp Neurol 2023; 17(4): 82–88, https://doi.org/10.54101/ACEN.2023.4.10.
- Dong Y., Wang S., Huang Q., Berg RW., Li G., He J. Neural decoding for intracortical brain–computer interfaces. Cyborg Bionic Syst 2023; 4: 0044, https://doi.org/10.34133/cbsystems.0044.
- Vansteensel M.J., Pels E.G.M., Bleichner M.G., Branco M.P., Denison T., Freudenburg Z.V., Gosselaar P., Leinders S., Ottens T.H., Van Den Boom M.A., Van Rijen P.C., Aarnoutse E.J., Ramsey N.F. Fully implanted brain–computer interface in a locked-in patient with ALS. N Engl J Med 2016; 375(21): 2060–2066, https://doi.org/10.1056/nejmoa1608085.
- Hochberg L.R., Serruya M.D., Friehs G.M., Mukand J.A., Saleh M., Caplan A.H., Branner A., Chen D., Penn R.D., Donoghue J.P. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature 2006; 442(7099): 164–171, https://doi.org/10.1038/nature04970.
- Hochberg L.R., Bacher D., Jarosiewicz B., Masse N.Y., Simeral J.D., Vogel J., Haddadin S., Liu J., Cash S.S., van der Smagt P., Donoghue J.P. Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature 2012; 485(7398): 372–375, https://doi.org/10.1038/nature11076.
- Collinger J.L., Wodlinger B., Downey J.E., Wang W., Tyler-Kabara E.C., Weber D.J., McMorland A.J.C., Velliste M., Boninger M.L., Schwartz A.B. High-performance neuroprosthetic control by an individual with tetraplegia. Lancet 2013; 381(9866): 557–564, https://doi.org/10.1016/s0140-6736(12)61816-9.
- Anumanchipalli G.K., Chartier J., Chang E.F. Speech synthesis from neural decoding of spoken sentences. Nature 2019; 568(7753): 493–498, https://doi.org/10.1038/s41586-019-1119-1.
- Willett F.R., Avansino D.T., Hochberg L.R., Henderson J.M., Shenoy K.V. High-performance brain-to-text communication via handwriting. Nature 2021; 593(7858): 249–254, https://doi.org/10.1038/s41586-021-03506-2.
- Flesher S.N., Downey J.E., Weiss J.M., Hughes C.L., Herrera A.J., Tyler-Kabara E.C., Boninger M.L., Collinger J.L., Gaunt R.A. A brain–computer interface that evokes tactile sensations improves robotic arm control. Science 2021; 372(6544): 831–836, https://doi.org/10.1126/science.abd0380.
- Willett F.R., Kunz E.M., Fan C., Avansino D.T., Wilson G.H., Choi E.Y., Kamdar F., Glasser M.F., Hochberg L.R., Druckmann S., Shenoy K.V., Henderson J.M. A high-performance speech neuroprosthesis. Nature 2023; 620(7976): 1031–1036, https://doi.org/10.1038/s41586-023-06377-x.
- Aflalo T., Kellis S., Klaes C., Lee B., Shi Y., Pejsa K., Shanfield K., Hayes-Jackson S., Aisen M., Heck C., Liu C., Andersen R.A. Neurophysiology. Decoding motor imagery from the posterior parietal cortex of a tetraplegic human. Science 2015; 348(6237): 906–910, https://doi.org/10.1126/science.aaa5417.
- Metzger S.L., Littlejohn K.T., Silva A.B., Moses D.A., Seaton M.P., Wang R., Dougherty M.E., Liu J.R., Wu P., Berger M.A., Zhuravleva I., Tu-Chan A., Ganguly K., Anumanchipalli G.K., Chang E.F. A high-performance neuroprosthesis for speech decoding and avatar control. Nature 2023; 620(7976): 1037–1046, https://doi.org/10.1038/s41586-023-06443-4.
- Ajiboye A.B., Willett F.R., Young D.R., Memberg W.D., Murphy B.A., Miller J.P., Walter B.L., Sweet J.A., Hoyen H.A., Keith M.W., Peckham P.H., Simeral J.D., Donoghue J.P., Hochberg L.R., Kirsch R.F. Restoration of reaching and grasping movements through brain-controlled muscle stimulation in a person with tetraplegia: a proof-of-concept demonstration. Lancet 2017; 389(10081): 1821–1830, https://doi.org/10.1016/s0140-6736(17)30601-3.
- Wang W., Collinger J.L., Degenhart A.D., Tyler-Kabara E.C., Schwartz A.B., Moran D.W., Weber D.J., Wodlinger B., Vinjamuri R.K., Ashmore R.C., Kelly J.W., Boninger M.L. An electrocorticographic brain interface in an individual with tetraplegia. PloS One 2013; 8(2): e55344, https://doi.org/10.1371/journal.pone.0055344.
- Davis K.C., Meschede-Krasa B., Cajigas I., Prins N.W., Alver C., Gallo S., Bhatia S., Abel J.H., Naeem J.A., Fisher L., Raza F., Rifai W.R., Morrison M., Ivan M.E., Brown E.N., Jagid J.R., Prasad A. Design-development of an at-home modular brain–computer interface (BCI) platform in a case study of cervical spinal cord injury. J Neuroeng Rehabil 2022; 19(1): 53, https://doi.org/10.1186/s12984-022-01026-2.
- Oxley T.J., Yoo P.E., Rind G.S., Ronayne S.M., Lee C.M.S., Bird C., Hampshire V., Sharma R.P., Morokoff A., Williams D.L., MacIsaac C., Howard M.E., Irving L., Vrljic I., Williams C., John S.E., Weissenborn F., Dazenko M., Balabanski A.H., Friedenberg D., Burkitt A.N., Wong Y.T., Drummond K.J., Desmond P., Weber D., Denison T., Hochberg L.R., Mathers S., O’Brien T.J., May C.N., Mocco J., Grayden D.B., Campbell B.C.V., Mitchell P., Opie N.L. Motor neuroprosthesis implanted with neurointerventional surgery improves capacity for activities of daily living tasks in severe paralysis: first in-human experience. J Neurointerv Surg 2021; 13(2): 102–108, https://doi.org/10.1136/neurintsurg-2020-016862.
- Mitchell P., Lee S.C.M., Yoo P.E., Morokoff A., Sharma R.P., Williams D.L., MacIsaac C., Howard M.E., Irving L., Vrljic I., Williams C., Bush S., Balabanski A.H., Drummond K.J., Desmond P., Weber D., Denison T., Mathers S., O’Brien T.J., Mocco J., Grayden D.B., Liebeskind D.S., Opie N.L., Oxley T.J., Campbell B.C.V. Assessment of safety of a fully implanted endovascular brain-computer interface for severe paralysis in 4 patients: the stentrode with thought-controlled digital switch (SWITCH) study. JAMA Neurol 2023; 80(3): 270–278, https://doi.org/10.1001/jamaneurol.2022.4847.
- Saha S., Mamun K.A., Ahmed K., Mostafa R., Naik G.R., Darvishi S., Khandoker A.H., Baumert M. Progress in brain computer interface: challenges and opportunities. Front Syst Neurosci 2021; 15: 578875, https://doi.org/10.3389/fnsys.2021.578875.
- Stavisky S.D., Willett F.R., Wilson G.H., Murphy B.A., Rezaii P., Avansino D.T., Memberg W.D., Miller J.P., Kirsch R.F., Hochberg L.R., Ajiboye A.B., Druckmann S., Shenoy K.V., Henderson J.M. Neural ensemble dynamics in dorsal motor cortex during speech in people with paralysis. ELife 2019; 8: e46015, https://doi.org/10.7554/elife.46015.
- Stavisky S.D., Willett F.R., Avansino D.T., Hochberg L.R., Shenoy K.V., Henderson J.M. Speech-related dorsal motor cortex activity does not interfere with iBCI cursor control. J Neural Eng 2020; 17(1): 016049, https://doi.org/10.1088/1741-2552/ab5b72.
- Humphrey D.R., Schmidt E.M., Thompson W.D. Predicting measures of motor performance from multiple cortical spike trains. Science 1970; 170(3959): 758–762, https://doi.org/10.1126/science.170.3959.758.
- Lilly J.C. Instantaneous relations between the activities of closely spaced zones on the cerebral cortex; electrical figures during responses and spontaneous activity. Am J Physiol 1954; 176(3): 493–504, https://doi.org/10.1152/ajplegacy.1954.176.3.493.
- Fetz E.E. Operant conditioning of cortical unit activity. Science 1969; 163(3870): 955–958, https://doi.org/10.1126/science.163.3870.955.
- Schmidt E.M. Single neuron recording from motor cortex as a possible source of signals for control of external devices. Ann Biomed Eng 1980; 8(4–6): 339–349, https://doi.org/10.1007/bf02363437.
- Ifft P.J., Shokur S., Li Z., Lebedev M.A., Nicolelis M.A.L. A brain-machine interface enables bimanual arm movements in monkeys. Sci Transl Med 2013; 5(210): 210ra154, https://doi.org/10.1126/scitranslmed.3006159.
- Chapin J.K., Moxon K.A., Markowitz R.S., Nicolelis M.A.L. Real-time control of a robot arm using simultaneously recorded neurons in the motor cortex. Nat Neurosci 1999; 2(7): 664–670, https://doi.org/10.1038/10223.
- Taylor D.M., Tillery S.I.H., Schwartz A.B. Direct cortical control of 3D neuroprosthetic devices. Science 2002; 296(5574): 1829–1832, https://doi.org/10.1126/science.1070291.
- Wessberg J., Stambaugh C.R., Kralik J.D., Beck P.D., Laubach M., Chapin J.K., Kim J., Biggs S.J., Srinivasan M.A., Nicolelis M.A.L. Real-time prediction of hand trajectory by ensembles of cortical neurons in primates. Nature 2000; 408(6810): 361–365, https://doi.org/10.1038/35042582.
- Carmena J.M., Lebedev M.A., Crist R.E., O’Doherty J.E., Santucci D.M., Dimitrov D.F., Patil P.G., Henriquez C.S., Nicolelis M.A.L. Learning to control a brain–machine interface for reaching and grasping by primates. PLoS Biol 2003; 1(2): E42, https://doi.org/10.1371/journal.pbio.0000042.
- Lebedev M.A., Carmena J.M., O’Doherty J.E., Zacksenhouse M., Henriquez C.S., Principe J.C., Nicolelis M.A.L. Cortical ensemble adaptation to represent velocity of an artificial actuator controlled by a brain-machine interface. J Neurosci 2005; 25(19): 4681–4693, https://doi.org/10.1523/jneurosci.4088-04.2005.
- O’Doherty J.E., Lebedev M.A., Hanson T.L., Fitzsimmons N.A., Nicolelis M.A.L. A brain-machine interface instructed by direct intracortical microstimulation. Front Integr Neurosci 2009; 3: 20, https://doi.org/10.3389/neuro.07.020.2009.
- Fitzsimmons N.A., Lebedev M.A., Peikon I.D., Nicolelis M.A.L. Extracting kinematic parameters for monkey bipedal walking from cortical neuronal ensemble activity. Front Integr Neurosci 2009; 3: 3, https://doi.org/10.3389/neuro.07.003.2009.
- Velliste M., Perel S., Spalding M.C., Whitford A.S., Schwartz A.B. Cortical control of a prosthetic arm for self-feeding. Nature 2008; 453(7198): 1098–1101, https://doi.org/10.1038/nature06996.
- Capogrosso M., Milekovic T., Borton D., Wagner F., Moraud E.M., Mignardot J.B., Buse N., Gandar J., Barraud Q., Xing D., Rey E., Duis S., Jianzhong Y., Ko W.K., Li Q., Detemple P., Denison T., Micera S., Bezard E., Bloch J., Courtine G. A brain-spine interface alleviating gait deficits after spinal cord injury in primates. Nature 2016; 539(7628): 284–288, https://doi.org/10.1038/nature20118.
- Ganguly K., Carmena J.M. Emergence of a stable cortical map for neuroprosthetic control. PLoS Biol 2009; 7(7): e1000153, https://doi.org/10.1371/journal.pbio.1000153.
- Gilja V., Nuyujukian P., Chestek C.A., Cunningham J.P., Yu B.M., Fan J.M., Churchland M.M., Kaufman M.T., Kao J.C., Ryu S.I., Shenoy K.V. A high-performance neural prosthesis enabled by control algorithm design. Nat Neurosci 2012; 15(12): 1752–1757, https://doi.org/10.1038/nn.3265.
- Ma X., Rizzoglio F., Bodkin K.L., Perreault E., Miller L.E., Kennedy A. Using adversarial networks to extend brain computer interface decoding accuracy over time. ELife 2023; 12: e84296, https://doi.org/10.7554/elife.84296.
- Athalye V.R., Khanna P., Gowda S., Orsborn A.L., Costa R.M., Carmena J.M. Invariant neural dynamics drive commands to control different movements. Curr Biol 2023; 33(14): 2962–2976.e15, https://doi.org/10.1016/j.cub.2023.06.027.
- Borra D., Filippini M., Ursino M., Fattori P., Magosso E. Motor decoding from the posterior parietal cortex using deep neural networks. J Neural Eng 2023; 20(3): 036016, https://doi.org/10.1088/1741-2552/acd1b6.
- Öztürk S., Devecioğlu İ., Güçlü B. Bayesian prediction of psychophysical detection responses from spike activity in the rat sensorimotor cortex. J Comput Neurosci 2023; 51(2): 207–222, https://doi.org/10.1007/s10827-023-00844-0.
- Orsborn A.L., Moorman H.G., Overduin S.A., Shanechi M.M., Dimitrov D.F., Carmena J.M. Closed-loop decoder adaptation shapes neural plasticity for skillful neuroprosthetic control. Neuron 2014; 82(6): 1380–1393, https://doi.org/10.1016/j.neuron.2014.04.048.
- Kao J.C., Nuyujukian P., Ryu S.I., Shenoy K.V. A high-performance neural prosthesis incorporating discrete state selection with hidden Markov models. IEEE Trans Biomed Eng 2017; 64(4): 935–945, https://doi.org/10.1109/tbme.2016.2582691.
- Willsey M.S., Nason-Tomaszewski S.R., Ensel S.R., Temmar H., Mender M.J., Costello J.T., Patil P.G., Chestek C.A. Real-time brain–machine interface in non-human primates achieves high-velocity prosthetic finger movements using a shallow feedforward neural network decoder. Nat Commun 2022; 13(1): 6899, https://doi.org/10.1038/s41467-022-34452-w.
- Левицкая О.С., Лебедев М.А. Интерфейс мозг–компьютер: будущее в настоящем. Вестник Российского государственного медицинского университета 2016; 2: 4–16, https://doi.org/10.24075/brsmu.2016-02-01.
- Dennett D.C. A treat: Grey Walter’s precognitive carousel. In: Consciousness explained. New York, Boston, London: Back Bay Books/Little, Brown and Company, Hachette Book Group USA; 1991; p. 167–168.
- Kennedy P.R., Bakay R.A. Restoration of neural output from a paralyzed patient by a direct brain connection. Neuroreport 1998; 9(8): 1707–1711, https://doi.org/10.1097/00001756-199806010-00007.
- Kennedy P.R., Bakay R.A.E., Moore M.M., Adams K., Goldwaithe J. Direct control of a computer from the human central nervous system. IEEE Trans Rehabil Eng 2000; 8(2): 198–202, https://doi.org/10.1109/86.847815.
- Kennedy P.R., Kirby M.T., Moore M.M., King B., Mallory A. Computer control using human intracortical local field potentials. IEEE Trans Neural Syst Rehabil Eng 2004; 12(3): 339–344, https://doi.org/10.1109/tnsre.2004.834629.
- Bartels J., Andreasen D., Ehirim P., Mao H., Seibert S., Wright E.J., Kennedy P. Neurotrophic electrode: method of assembly and implantation into human motor speech cortex. J Neurosci Methods 2008; 174(2): 168–176, https://doi.org/10.1016/j.jneumeth.2008.06.030.
- Guenther F.H., Brumberg J.S., Wright E.J., Nieto-Castanon A., Tourville J.A., Panko M., Law R., Siebert S.A., Bartels J.L., Andreasen D.S., Ehirim P., Mao H., Kennedy P.R. A wireless brain-machine interface for real-time speech synthesis. PloS One 2009; 4(12): e8218, https://doi.org/10.1371/journal.pone.0008218.
- Brumberg J.S., Nieto-Castanon A., Kennedy P.R., Guenther F.H. Brain–computer interfaces for speech communication. Speech Commun 2010; 52(4): 367–379, https://doi.org/10.1016/j.specom.2010.01.001.
- Лебедев М.А. Нейрокомпьютерные интерфейсы для расширения функций мозга. Наука и инновации в медицине 2016; 1(3): 11–27, https://doi.org/10.35693/2500-1388-2016-0-3-11-27.
- Maynard E.M., Nordhausen C.T., Normann R.A. The Utah intracortical electrode array: a recording structure for potential brain-computer interfaces. Electroencephalogr Clin Neurophysiol 1997; 102(3): 228–239, https://doi.org/10.1016/s0013-4694(96)95176-0.
- Guillory K.S., Normann R.A. A 100-channel system for real time detection and storage of extracellular spike waveforms. J Neurosci Methods 1999; 91(1–2): 21–29, https://doi.org/10.1016/s0165-0270(99)00076-x.
- Suner S., Fellows M.R., Vargas-Irwin C., Nakata G.K., Donoghue J.P. Reliability of signals from a chronically implanted, silicon-based electrode array in non-human primate primary motor cortex. IEEE Trans Neural Syst Rehabil Eng 2005; 13(4): 524–541, https://doi.org/10.1109/tnsre.2005.857687.
- Serruya M.D., Hatsopoulos N.G., Paninski L., Fellows M.R., Donoghue J.P. Instant neural control of a movement signal. Nature 2002; 416(6877): 141–142, https://doi.org/10.1038/416141a.
- Donoghue J.P., Nurmikko A., Black M., Hochberg L.R. Assistive technology and robotic control using motor cortex ensemble-based neural interface systems in humans with tetraplegia. J Physiol 2007; 579(Pt 3): 603–611, https://doi.org/10.1113/jphysiol.2006.127209.
- Kim S.P., Simeral J.D., Hochberg L.R., Donoghue J.P., Friehs G.M., Black M.J. Point-and-click cursor control with an intracortical neural interface system by humans with tetraplegia. IEEE Trans Neural Syst Rehabil Eng 2011; 19(2): 193–203, https://doi.org/10.1109/tnsre.2011.2107750.
- Truccolo W., Friehs G.M., Donoghue J.P., Hochberg L.R. Primary motor cortex tuning to intended movement kinematics in humans with tetraplegia. J Neurosci 2008; 28(5): 1163–1178, https://doi.org/10.1523/jneurosci.4415-07.2008.
- Kim S.P., Simeral J.D., Hochberg L.R., Donoghue J.P., Black M.J. Neural control of computer cursor velocity by decoding motor cortical spiking activity in humans with tetraplegia. J Neural Eng 2008; 5(4): 455–476, https://doi.org/10.1088/1741-2560/5/4/010.
- Simeral J.D., Kim S.P., Black M.J., Donoghue J.P., Hochberg L.R. Neural control of cursor trajectory and click by a human with tetraplegia 1000 days after implant of an intracortical microelectrode array. J Neural Eng 2011; 8(2): 025027, https://doi.org/10.1088/1741-2560/8/2/025027.
- Wodlinger B., Downey J.E., Tyler-Kabara E.C., Schwartz A.B., Boninger M.L., Collinger J.L. Ten-dimensional anthropomorphic arm control in a human brain-machine interface: difficulties, solutions, and limitations. J Neural Eng 2015; 12(1): 016011, https://doi.org/10.1088/1741-2560/12/1/016011.
- Downey J.E., Brane L., Gaunt RA., Tyler-Kabara EC., Boninger M.L., Collinger J.L. Motor cortical activity changes during neuroprosthetic-controlled object interaction. Sci Rep 2017; 7(1): 16947, https://doi.org/10.1038/s41598-017-17222-3.
- Handelman D.A., Osborn L.E., Thomas T.M., Badger A.R., Thompson M., Nickl R.W., Anaya M.A., Wormley J.M., Cantarero G.L., McMullen D., Crone N.E., Wester B., Celnik P.A., Fifer M.S., Tenore F.V. Shared control of bimanual robotic limbs with a brain-machine interface for self-feeding. Front Neurorobot 2022; 16: 918001, https://doi.org/10.3389/fnbot.2022.918001.
- Gilja V., Pandarinath C., Blabe C.H., Nuyujukian P., Simeral J.D., Sarma A.A., Sorice B.L., Perge J.A., Jarosiewicz B., Hochberg L.R., Shenoy K.V., Henderson J.M. Clinical translation of a high-performance neural prosthesis. Nat Med 2015; 21(10): 1142–1145, https://doi.org/10.1038/nm.3953.
- Brandman D.M., Hosman T., Saab J., Burkhart M.C., Shanahan B.E., Ciancibello J.G., Sarma A.A., Milstein D.J., Vargas-Irwin C.E., Franco B., Kelemen J., Blabe C., Murphy B.A., Young D.R., Willett F.R., Pandarinath C., Stavisky S.D., Kirsch R.F., Walter B.L., Bolu Ajiboye A., Cash S.S., Eskandar E.N., Miller J.P., Sweet J.A., Shenoy K.V., Henderson J.M., Jarosiewicz B., Harrison M.T., Simeral J.D., Hochberg L.R. Rapid calibration of an intracortical brain-computer interface for people with tetraplegia. J Neural Eng 2018; 15(2): 026007, https://doi.org/10.1088/1741-2552/aa9ee7.
- Paulo D.L., Sheth S.A., McKhann G.M. II. Living brain to hand: bypassing spinal cord quadriplegia using a novel neuroprosthesis. Neurosurgery 2016; 79(2): N13–N14, https://doi.org/10.1227/01.neu.0000489885.18088.eb.
- Chadwick E.K., Blana D., Simeral J.D., Lambrecht J., Kim S.P., Cornwell A.S., Taylor D.M., Hochberg L.R., Donoghue J.P., Kirsch R.F. Continuous neuronal ensemble control of simulated arm reaching by a human with tetraplegia. J Neural Eng 2011; 8(3): 034003, https://doi.org/10.1088/1741-2560/8/3/034003.
- Bouton C.E., Shaikhouni A., Annetta N.V., Bockbrader M.A., Friedenberg D.A., Nielson D.M., Sharma G., Sederberg P.B., Glenn B.C., Mysiw W.J., Morgan A.G., Deogaonkar M., Rezai A.R. Restoring cortical control of functional movement in a human with quadriplegia. Nature 2016; 533(7602): 247–250, https://doi.org/10.1038/nature17435.
- Hughes C., Herrera A., Gaunt R., Collinger J. Bidirectional brain-computer interfaces. Handb Clin Neurol 2020; 168: 163–181, https://doi.org/10.1016/B978-0-444-63934-9.00013-5.
- Bacher D., Jarosiewicz B., Masse N.Y., Stavisky S.D., Simeral J.D., Newell K., Oakley E.M., Cash S.S., Friehs G., Hochberg L.R. Neural point-and-click communication by a person with incomplete locked-in syndrome. Neurorehabil Neural Repair 2015; 29(5): 462–471, https://doi.org/10.1177/1545968314554624.
- Jarosiewicz B., Sarma A.A., Bacher D., Masse N.Y., Simeral J.D., Sorice B., Oakley E.M., Blabe C., Pandarinath C., Gilja V., Cash S.S., Eskandar E.N., Friehs G., Henderson J.M., Shenoy K.V., Donoghue J.P., Hochberg L.R. Virtual typing by people with tetraplegia using a self-calibrating intracortical brain-computer interface. Sci Transl Med 2015; 7(313): 313ra179, https://doi.org/10.1126/scitranslmed.aac7328.
- Pandarinath C., Nuyujukian P., Blabe C.H., Sorice B.L., Saab J., Willett F.R., Hochberg L.R., Shenoy K.V., Henderson J.M. High performance communication by people with paralysis using an intracortical brain-computer interface. ELife 2017; 6: e18554, https://doi.org/10.7554/elife.18554.
- Nuyujukian P., Albites Sanabria J., Saab J., Pandarinath C., Jarosiewicz B., Blabe C.H., Franco B., Mernoff S.T., Eskandar E.N., Simeral J.D., Hochberg L.R., Shenoy K.V., Henderson J.M. Cortical control of a tablet computer by people with paralysis. PloS One 2018; 13(11): e0204566, https://doi.org/10.1371/journal.pone.0204566.
- Simeral J.D., Hosman T., Saab J., Flesher S.N., Vilela M., Franco B., Kelemen J.N., Brandman D.M., Ciancibello J.G., Rezaii P.G., Eskandar E.N., Rosler D.M., Shenoy K.V., Henderson J.M., Nurmikko A.V., Hochberg L.R. Home use of a percutaneous wireless intracortical brain-computer interface by individuals with tetraplegia. IEEE Trans Biomed Eng 2021; 68(7): 2313–2325, https://doi.org/10.1109/tbme.2021.3069119.
- Shah N.P., Willsey M.S., Hahn N., Kamdar F., Avansino D.T., Hochberg L.R., Shenoy K.V., Henderson J.M. A brain-computer typing interface using finger movements. Int IEEE EMBS Conf Neural Eng 2023; 2023: 10.1109/ner52421.2023.10123912, https://doi.org/10.1109/ner52421.2023.10123912.
- Dekleva B.M., Weiss J.M., Boninger M.L., Collinger J.L. Generalizable cursor click decoding using grasp-related neural transients. J Neural Eng 2021; 18(4): 0460e9, https://doi.org/10.1088/1741-2552/ac16b2.
- Jun J.J., Steinmetz N.A., Siegle J.H., Denman D.J., Bauza M., Barbarits B., Lee A.K., Anastassiou C.A., Andrei A., Aydın Ç., Barbic M., Blanche T.J., Bonin V., Couto J., Dutta B., Gratiy S.L., Gutnisky D.A., Häusser M., Karsh B., Ledochowitsch P., Lopez C.M., Mitelut C., Musa S., Okun M., Pachitariu M., Putzeys J., Rich P.D., Rossant C., Sun W.L., Svoboda K., Carandini M., Harris K.D., Koch C., O’Keefe J., Harris T.D. Fully integrated silicon probes for high-density recording of neural activity. Nature 2017; 551(7679): 232–236, https://doi.org/10.1038/nature24636.
- Musk E.; Neuralink. An integrated brain-machine interface platform with thousands of channels. J Med Internet Res 2019; 21(10): e16194, https://doi.org/10.2196/16194.
- Nurmikko A. Challenges for large-scale cortical interfaces. Neuron 2020; 108(2): 259–269, https://doi.org/10.1016/j.neuron.2020.10.015.
- Vázquez-Guardado A., Yang Y., Bandodkar A.J., Rogers J.A. Recent advances in neurotechnologies with broad potential for neuroscience research. Nat Neurosci 2020; 23(12): 1522–1536, https://doi.org/10.1038/s41593-020-00739-8.
- Sahasrabuddhe K., Khan A.A., Singh A.P., Stern T.M., Ng Y., Tadić A., Orel P., LaReau C., Pouzzner D., Nishimura K., Boergens K.M., Shivakumar S., Hopper M.S., Kerr B., Hanna M.E.S., Edgington R.J., McNamara I., Fell D., Gao P., Babaie-Fishani A., Veijalainen S., Klekachev A.V., Stuckey A.M., Luyssaert B., Kozai T.D.Y., Xie C., Gilja V., Dierickx B., Kong Y., Straka M., Sohal H.S., Angle M.R. The Argo: a 65,536 channel recording system for high density neural recording in vivo. BioRxiv; 2020, https://doi.org/10.1101/2020.07.17.209403.
- Zhou Y., Yang H., Wang X., Yang H., Sun K., Zhou Z., Sun L., Zhao J., Tao T.H., Wei X. A mosquito mouthpart-like bionic neural probe. Microsyst Nanoeng 2023; 9: 88, https://doi.org/10.1038/s41378-023-00565-5.
- Trotier A., Bagnoli E., Walski T., Evers J., Pugliese E., Lowery M., Kilcoyne M., Fitzgerald U., Biggs M. Micromotion derived fluid shear stress mediates peri-electrode gliosis through mechanosensitive ion channels. Adv Sci (Weinh) 2023; 10(27): e2301352, https://doi.org/10.1002/advs.202301352.
- Petrosyan A., Voskoboinikov A., Sukhinin D., Makarova A., Skalnaya A., Arkhipova N., Sinkin M., Ossadtchi A. Speech decoding from a small set of spatially segregated minimally invasive intracranial EEG electrodes with a compact and interpretable neural network. J Neural Eng 2022; 19(6): 066016, https://doi.org/10.1088/1741-2552/aca1e1.
- Chen K., Cambi F., Kozai T.D.Y. Pro-myelinating clemastine administration improves recording performance of chronically implanted microelectrodes and nearby neuronal health. Biomaterials 2023; 301: 122210, https://doi.org/10.1016/j.biomaterials.2023.122210.
- Bergeron D., Iorio-Morin C., Bonizzato M., Lajoie G., Orr Gaucher N., Racine É., Weil A.G. Use of invasive brain-computer interfaces in pediatric neurosurgery: technical and ethical considerations. J Child Neurol 2023; 38(3–4): 223–238, https://doi.org/10.1177/08830738231167736.
- Nowik K., Langwińska-Wośko E., Skopiński P., Nowik K.E., Szaflik J.P. Bionic eye review — an update. J Clin Neurosci 2020; 78: 8–19, https://doi.org/10.1016/j.jocn.2020.05.041.
- Drew L. The rise of brain-reading technology: what you need to know. Nature 2023; 623(7986): 241–243, https://doi.org/10.1038/d41586-023-03423-6.








